
Bilder von Roland Halbe


















Bilder von ICD/ITKE Universität Stuttgart

















Prozess Bilder von ICD/ITKE Universität Stuttgart










{kind=link}
ICD/ITKE FORSCHUNGSPAVILLON 2015-16
Das Institut für Computerbasiertes Entwerfen (ICD) und das Institut für Tragkonstruktionen und Konstruktives Entwerfen (ITKE) der Universität Stuttgart haben im April 2016 einen neuen Forschungspavillon fertiggestellt. Dieser setzt erstmals industrielle Nähtechniken für Holzkonstruktionen im Maßstab der Architektur ein, und zeigt damit auf, wie textile und
robotische Fertigungsmethoden kombiniert und im Leichtbau von Segmentschalen angewendet werden können. Der Pavillon setzt die Reihe von Versuchsbauten an der Universität Stuttgart fort, die neue Möglichkeiten computerbasierter Entwurfs-, Simulationsund Herstellungstechniken in der Architektur demonstrieren. Das Projekt wurde von wissenschaftlichen Mitarbeiterinnen und Mitarbeitern sowie Studierenden in einem interdisziplinären Team aus Architekten, Ingenieuren, Biologen und Paläontologen entwickelt und realisiert.
Bionische Untersuchungen von Schalentragwerken
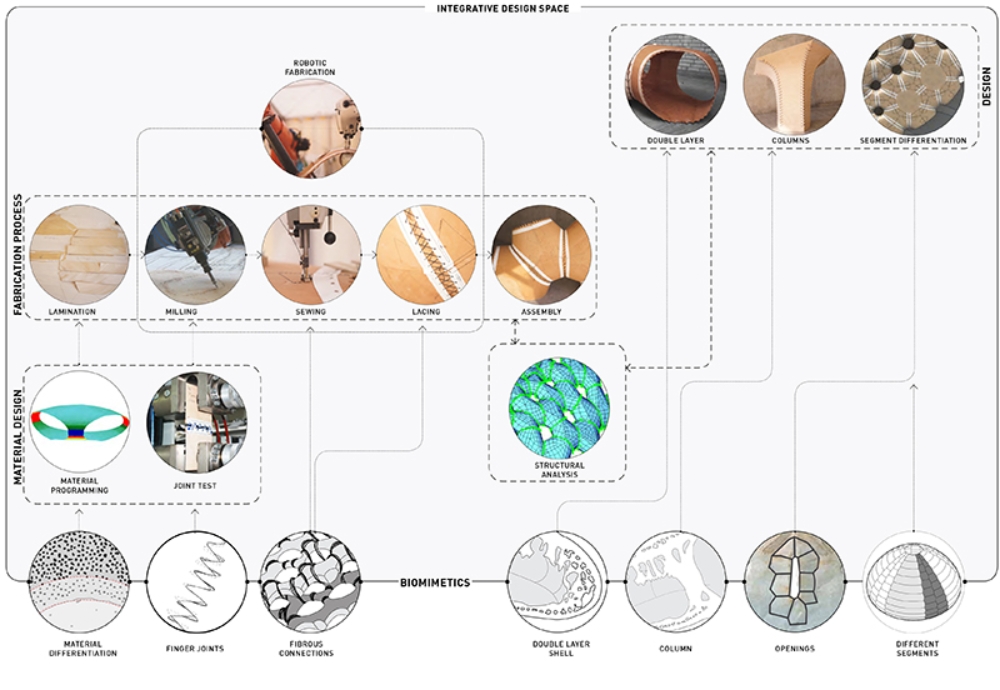
Ausgangspunkt der Entwicklung des ICD/ITKE Forschungspavillons 2015-16 war einerseits die bionische Untersuchung von segmentierten Schalentragwerken in der Natur, und andererseits die Anwendung von neuartigen robotergesteuerten Fertigungsmethoden zum Vernähen von dünnen Furnierplatten aus Buchenholz.
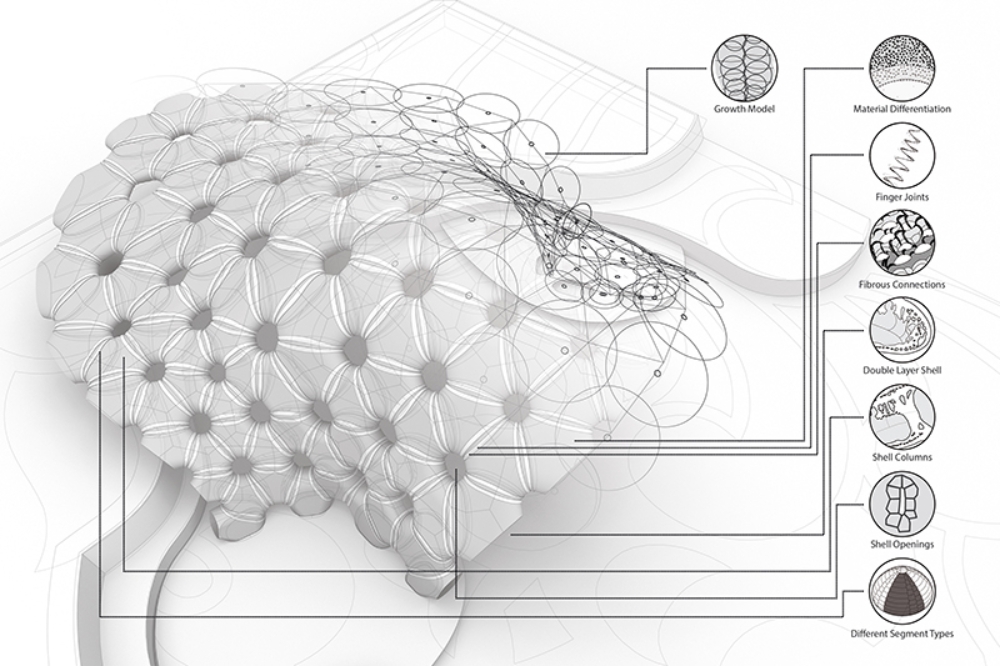
Der Entwurf des Pavillons beruht auf der Analyse der Konstruktionsmorphologie des Sanddollars, einer Unterart der Seeigel. Vorangegangene Untersuchungen der Forschungspartner hatten bereits zur Übertragung bionischer Konstruktionsprinzipien in architektonische Segmentschalen aus Holzplatten mit Fingerzinkenverbindungen geführt. In diesem Projekt wurden die natürlichen Segmentschalen vertiefend in enger Zusammenarbeit von Architekten und Ingenieuren der Universität Stuttgart und Biologen der Universität Tübingen untersucht, um weitere relevante Aspekte zu identifizieren. Im Stamm Echinodermata wurden zwei Spezies aus der Klasse der Echinoidea (Seeigel) und der Ordnung der Clypeasteroida (Sanddollar) ausgewählt, die für die technische Übertragung von weiteren Konstruktions- und Bildungsprinzipien besonders geeignet erscheinen. Mittels Rasterelektronenmikroskop erstellte Detailaufnahmen von verschiedenen Seeigel- und Sanddollarspezies ermöglichen, deren komplexe innere Struktur besser zu verstehen. Durch diese Aufnahmen, sowie mithilfe weitergehender Literaturrecherchen, wurde deutlich, dass die Verbindungen zwischen den Plattensegmenten der Seeigelschale nicht nur aus den bereits bekannten
Fingerzinken, sondern auch aus zusätzlichen Faserverbindungen bestehen. Es wird vermutet, dass diese elastischen Verbindungen relativ steifer Platten die Integrität der Sanddollarschale während des Wachstumsprozesses sicherstellen. Darüber hinaus wurde erkannt, dass die Leistungsfähigkeit der Schale des Sanddollars auch auf der Differenzierung der Materialeigenschaften innerhalb einer zweilagigen Struktur beruht.
Der Werkstoff Holz und seine Eigenschaften
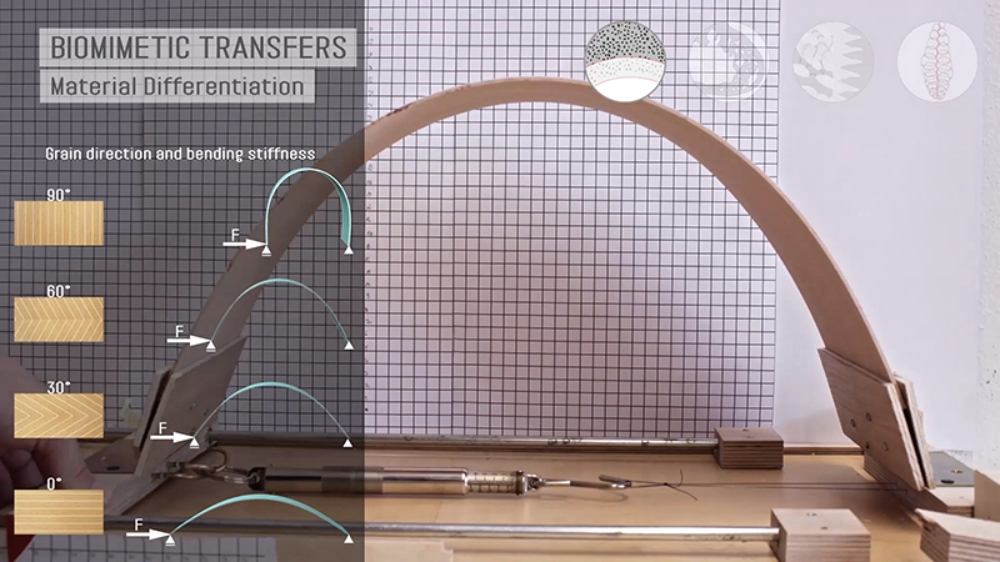
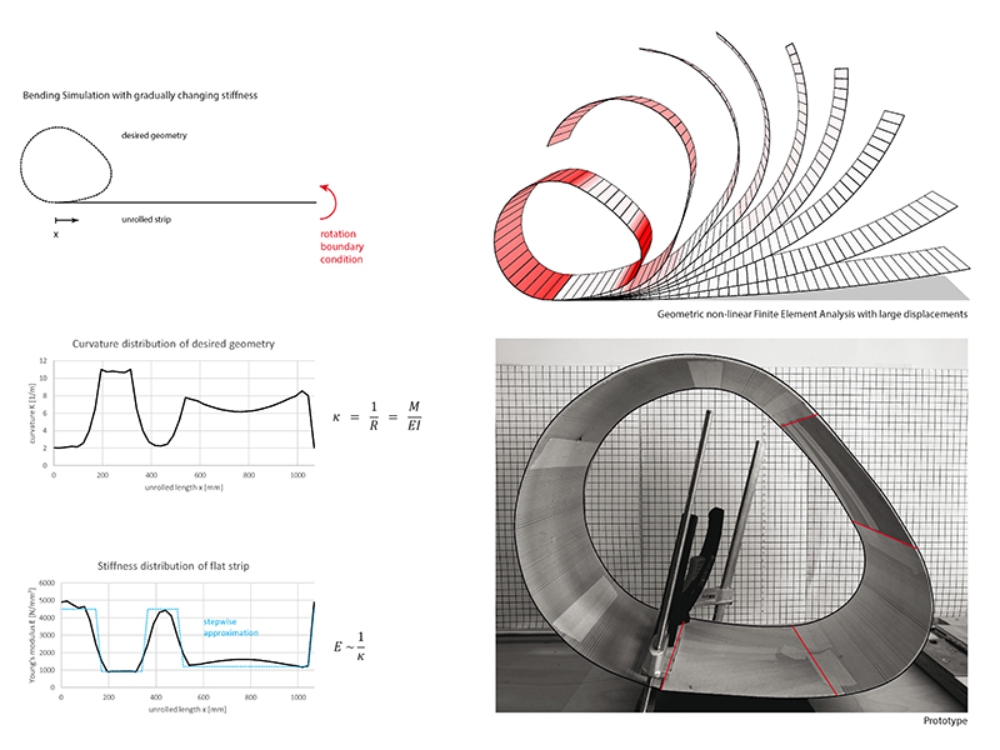
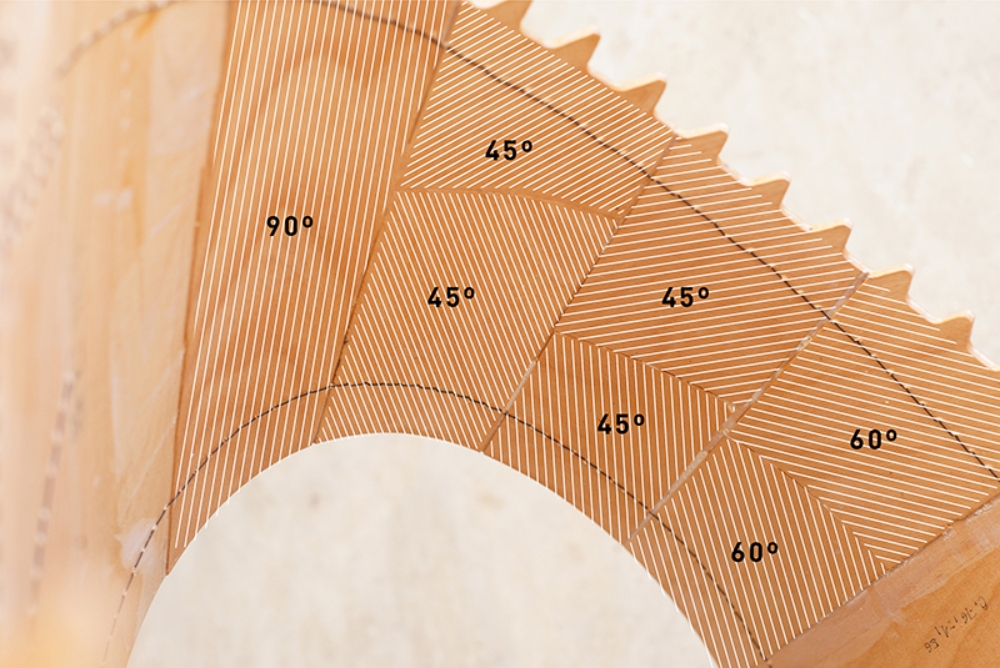
Auf Grundlage dieser bionischen Erkenntnisse sowie der charakteristischen Materialeigenschaften von Holz wurde ein Konstruktionssystem entwickelt, das als zweilagige Struktur die Formen nachbildet, die beim Sanddollar durch Sekundärwachstum entstehen. Als Ausgangswerkstoff dienten dünne Furnierstreifen, die zu ebenen, individuell gefertigten und 3-5 mm dicken Sperrholzplatten laminiert wurden. Diese Bauelemente nutzen die Anisotropie des Holzes, um die verschiedene Faserausrichtung der Furnierbestandteile und die unterschiedliche Materialstärke zu differenzieren. So können die zunächst ebenen Bauteile elastisch so verformt werden, dass sich allein durch den
Laminataufbau gesteuert eine spezifische Segmentgeometrie mit ungleichmäßigen Krümmungsradien einstellt. Diese wird dann durch das robotische Vernähen in Form gehalten. Die zweilagigen Segmente tragen äußere Lasten überwiegend durch Normalkräfte und Scherkräfte in der Plattenebene ab. Während letztere hauptsächlich in den Verbindungen der Segmente durch die Fingerzinken übertragen werden, werden Zugkräfte durch Reepschnüre aufgenommen. Im Ergebnis entsteht so ein leistungsfähiges und komplex geformtes Schalentragwerk aus einfachen, ebenen Furnierstreifen.
Robotergesteuerte Nähtechniken für Segmentschalen aus Holz
Das Projekt untersucht den Einsatz textiler Fertigungstechniken um neuartige Holzverbindungen zu entwickeln. Insbesondere für dünne Sperrholzplatten sind kontinuierliche - gegenüber punktuellen - Verbindungen zu bevorzugen, da sie den Materialaufbau des Holzes weniger schwächen. Hierfür werden für Konstruktionen aus dünnen Furnierhölzern üblicherweise geklebte Verbindungen eingesetzt. Im gebogenen Zustand können die für das Laminieren erforderlichen Anpressdrücke allerdings nur unter Einsatz aufwendiger Formwerkzeuge erreicht werden.
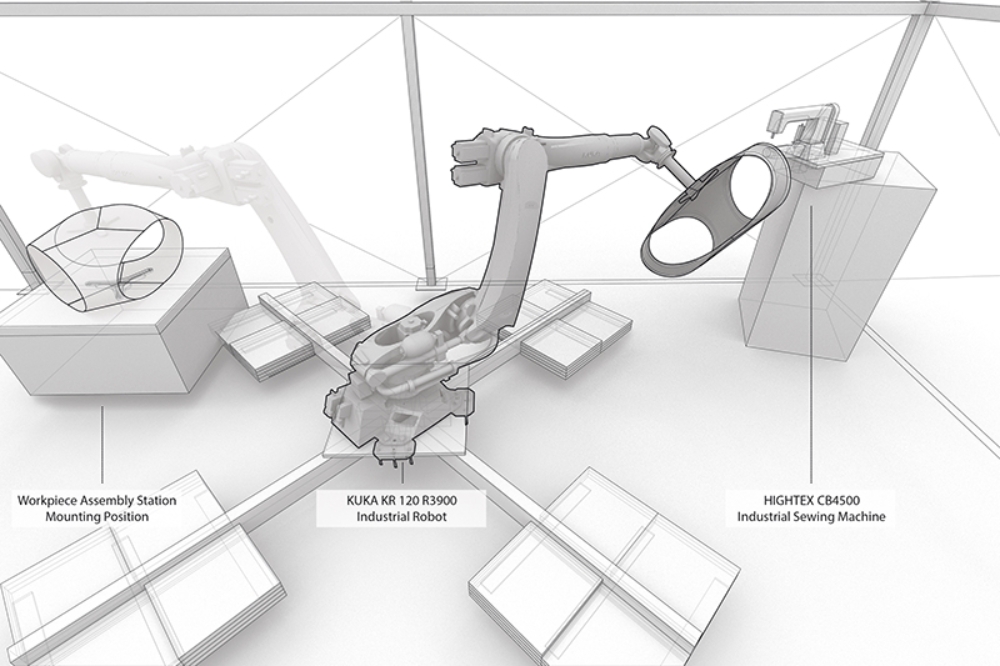
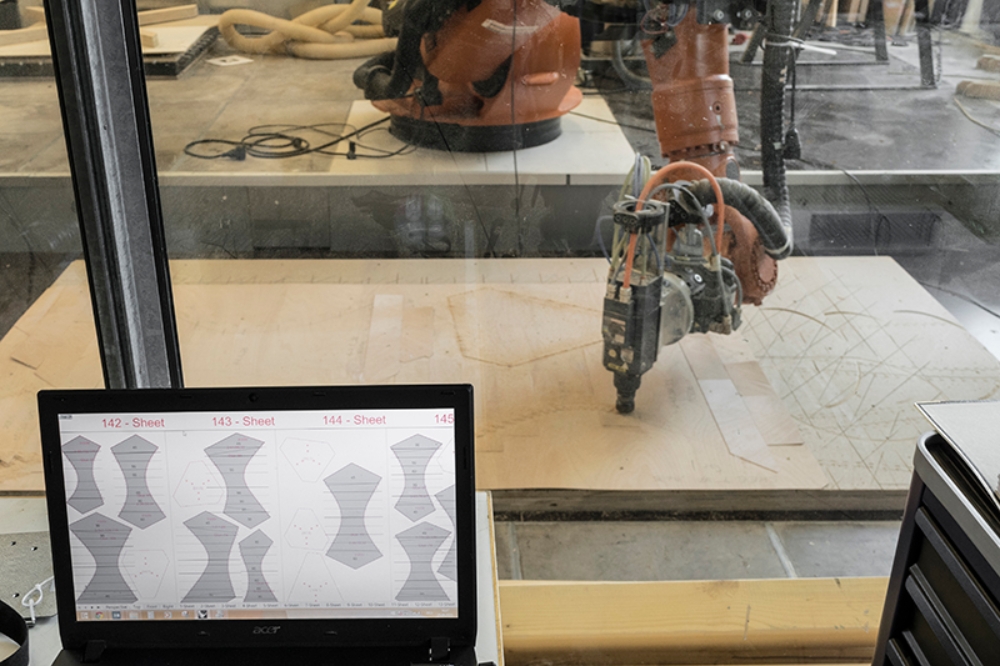
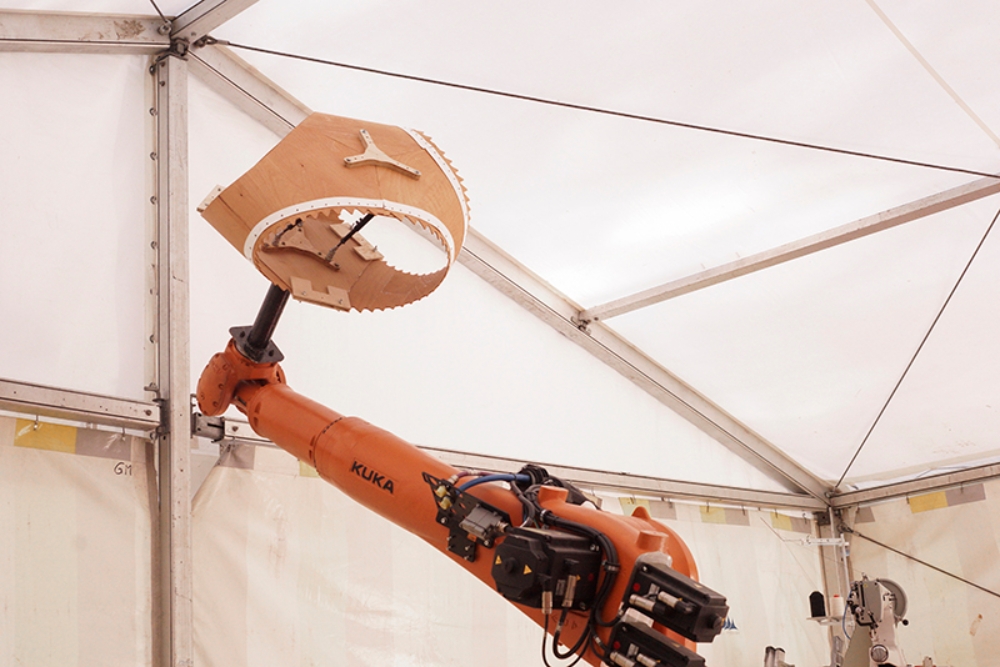
Daher wurde im vorliegenden Versuchsbau ein robotergesteuerter Fertigungsprozess entwickelt, der die Verbindung, den Formschluss und das Presslaminat der individuell gebogenen Sperrholzplatten durch das Vernähen mit einer Industrienähmaschine ermöglicht. Ein Industrieroboter assistierte beim temporären Fixieren der gebogenen Sperrholzstreifen in der gewünschten geometrischen Konfiguration. Während des darauffolgenden Nähprozesses führte der Roboter die gebogenen Streifen durch die Nähmaschine und verbindet diese miteinander. Zusätzlich wurden Membranstreifen als Verbindungselemente zwischen den Segmenten aufgenäht. Diese wurden später beim Aufbau mittels Kevlarschnüren verbunden, welche Zugkräfte zwischen den einzelnen Segmenten übertragen.
Die Roboter- und Nähmaschinensteuerung sind über eine spezifische programmierte Software integriert. Diese Schnittstelle ermöglicht dem Roboter immer sowohl die aktuelle Position des Werkstücks als auch den Status der Nähmaschine zu kennen und die Bewegung zu synchronisieren.
Demonstrator an der Schnittstelle zwischen Architektur, Ingenieurwesen und Biologie
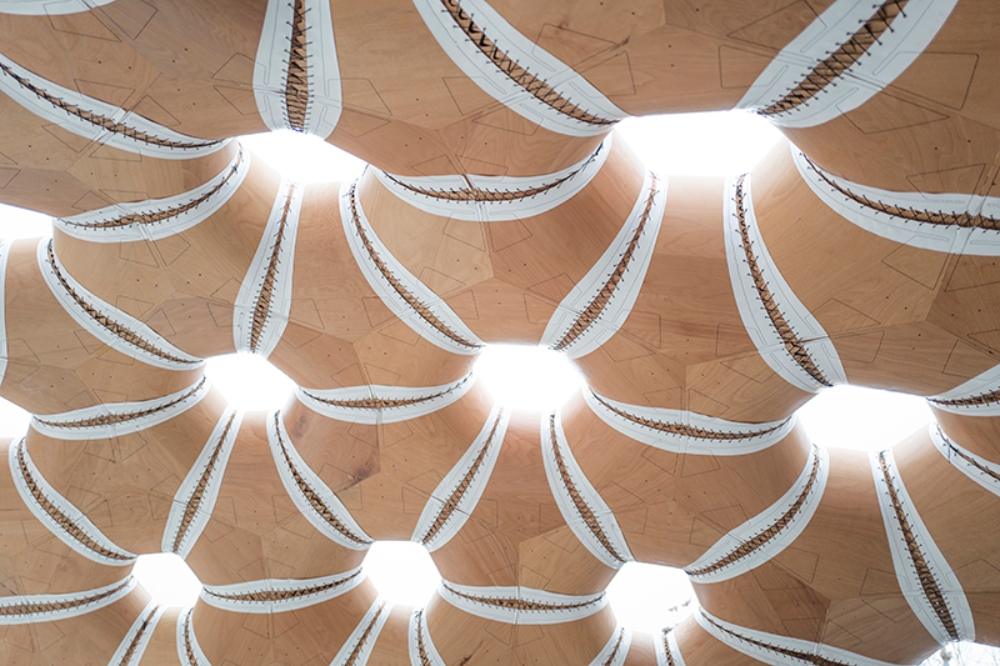
Der Pavillon besteht insgesamt aus 151 unterschiedlichen, robotisch vorgefertigten Segmenten. Jedes besteht aus drei einzelnen individuell laminierten Furnierstreifen aus Buchenholz. Diese individuellen Segmente mit Biegeradien zwischen 30cm und 75cm sind in Form und Faserorientierung jeweils an die lokalen statischen und geometrischen Erfordernisse angepasst. Die gesamte Konstruktion wiegt 780 kg, spannt 9,3m und überdacht eine Fläche von insgesamt 85m². Daraus ergibt sich ein Verhältnis von Materialdicke zu Spannweite von gerademal 1/1000 im Mittel und ein durchschnittliches Konstruktionsgewicht von 7,85 Kg / m² bezogen auf die Schalenoberfläche. Darüber hinaus
ermöglichen die neuartigen textilen Verbindungen den Verzicht auf jegliche Art von metallischen Verbindungsmitteln.
Der Gesamtentwurf geht aus den ortsspezifischen Randbedingungen auf dem Universitätscampus hervor. Der Pavillon schafft einen Halbinnenraum, der die Topographie des Platzes aufnimmt und sich zu den umliegenden Universitätsgebäuden hin öffnet. Zugleich demonstriert das neuentwickelte Konstruktionssystem seine morphologische Anpassungsfähigkeit zur Schaffung räumlich komplexer Strukturen. Insgesamt zeigt dieser Forschungspavillon, wie die Wechselwirkungen zwischen Material, Form, Raum, Tragwerk und robotergesteuerter Fertigung zu innovativen Holzbauweisen führen kann. Der multidisziplinäre Forschungsansatz ermöglicht dabei nicht nur eine leistungsfähige und materialsparende Leichtbaukonstruktion, sondern erkundet auch neue räumliche und tektonischen Möglichkeiten für die Architektur.
PROJEKT TEAM
ICD Institut für Computerbasiertes Entwerfen – Prof. Achim Menges
ITKE Institut für Tragkonstruktionen und Konstruktives Entwerfen – Prof. Jan Knippers
Wissenschaftliche Entwicklung und Projektleitung
Simon Bechert, Oliver David Krieg, Tobias Schwinn, Daniel Sonntag
Konzeptentwicklung, Systementwicklung und Realisierung
Martin Alvarez, Jan Brütting, Sean Campbell, Mariia Chumak, Hojoong Chung, Joshua Few, Eliane Herter,
Rebecca Jaroszewski, Ting-Chun Kao, Dongil Kim, Kuan-Ting Lai, Seojoo Lee, Riccardo Manitta, Erik Martinez,
Artyom Maxim, Masih Imani Nia, Andres Obregon, Luigi Olivieri, Thu Nguyen Phuoc, Giuseppe Pultrone, Jasmin
Sadegh, Jenny Shen, Michael Sveiven, Julian Wengzinek, and Alexander Wolkow
Mit der Unterstützung von Long Nguyen, Michael Preisack und Lauren Vasey
In Zusammenarbeit mit
Institut für Evolution und Ökologie, Fachbereich Evolutionsbiologie der Invertebraten – Prof. Oliver Betz
Zentrum für Angewandte Geowissenschaften, Fachbereich Invertebraten-Paläontologie – Prof. James Nebelsick
Universität Tübingen
Unterstützt von:
Deutsche Forschungsgemeinschaft (DFG)
GETTYLABandBW-Bank
Edelrid
Frank Brunnet GmbH
Forst BW
Groz-Beckert KG
Guetermann GmbH
Hess & Co.
KUKA Roboter GmbH
Mehler Texnologies GmbH
