
Bilder von ICD/ITKE Universität Stuttgart











Prozess Bilder und Diagramme von ICD/ITKE Universität Stuttgart











{kind=link}
ITECH Forschungsdemonstrator 2018-19
Der ITECH Forschungsdemonstrator 2018-19 untersucht biegsame Mechanismen im architektonischen Maßstab, deren Faltungsmuster von den Flügeln der Coleoptera coccinellidae (Marienkäfer) inspiriert wurde. Der Demonstrator besteht aus zwei adaptiven Faltelementen, die aus kohlenstoff- und glasfaserverstärkten Verbundkunststoff hergestellt wurden. Im Demonstrator wird erstmalig die industriell in der Serienfertigung verbreitete Tape‑Legetechnik für die automatisierte Herstellung von zwei großformatigen, adaptiven Faltelementen aus kohlenstoff- und glasfaserverstärkten Verbundkunststoffen eingesetzt. Die Faltbewegung der Elemente wird durch nachgiebige Gelenkzonen mit integrierten, pneumatischen Aktuatoren erreicht. Ein interaktives Steuerungssystem aus integrierten Sensoren, Online-Kommunikation und Backend-Informationsverarbeitung ermöglicht die interaktive und benutzergesteuerte Adaption der Faltelemente. Das Projekt ist Teil einer erfolgreichen Reihe von Forschungsdemonstratoren, die das Potenzial von computergestützten Entwurfs-, Simulations- und Fertigungsprozessen in bio‑inspirierter Architektur aufzeigen. Das Projekt wurde von einem interdisziplinären Team aus Studenten/-innen und wissenschaftlichen Mitarbeitern/-innen aus den Fachgebieten Architektur, Ingenieurwesen, Biologie und Paläontologie entworfen und realisiert.
ADAPTIVE ARCHITEKTUR
Adaptive Strukturen haben Architekten und Ingenieure schon immer fasziniert. Im Laufe der Geschichte wurden zahlreiche Konzepte und technische Lösungen entwickelt, durch die Gebäude sowohl auf unterschiedliche räumliche und strukturelle Anforderungen, als auch auf sich verändernde Umwelteinflüsse reagieren können. Während die Funktion der meisten jüngeren Beispiele adaptiver und rekonfigurierbarer architektonischer Elemente auf Starrkörpermechanismen basiert, untersucht der ITECH Forschungsdemonstrator 2018-19 das Potenzial faserverstärkter Verbundkunststoffe für groß-maßstäbliche kinetische Faltsysteme. Die Bewegungsmöglichkeit basiert in diesem Fall auf der elastischen Verformung definierter elastisch verformbarer Gelenkzonen, und ermöglicht so eine räumliche Rekonfiguration. Darüber hinaus zeigt der Demonstrator, wie computerbasierte Methoden und robotische Systeme nicht nur für den Entwurfs- und Fertigungsprozess verwendet werden können, sondern auch für die architektonische Struktur an sich. Das gesamte kinetische System ist fähig, den Grad seiner Geschlossenheit zu verändern und stellt ein intelligentes robotisches Architektursystem dar, das in der Lage ist durch räumliche Adaption auf seine Benutzer zu reagieren und mit ihnen zu kommunizieren.
BIONISCHE UNTERSUCHUNGEN
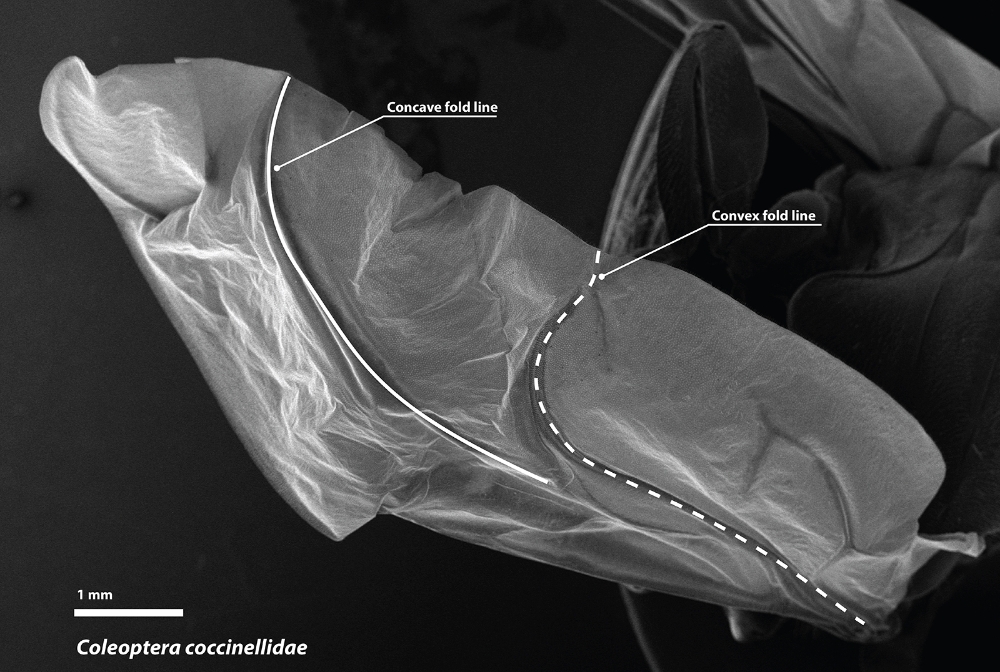
In ersten biologischen Untersuchungen wurden kinematischen Wirkprinzipien einzelner biologischer Ideengeber aus der Natur identifiziert, abstrahiert und in technische Architekturanwendungen übertragen. In Zusammenarbeit mit dem Institut für Evolution und Ökologie, Fachbereich Evolutionsbiologie der Invertebraten und dem Zentrum für Angewandte Geowissenschaften, Fachbereich Invertebraten-Paläontologie der Universität Tübingen wurde das kinematische Verhalten der origami-ähnlichen Faltmuster der Coleoptera coccinellidae-Flügel als vielversprechendes biologisches Prinzip ausgewählt.
Wie viele andere Käferarten, bedecken die Coleoptera coccinellidae ihre dünnen und zerbrechlichen Hinterflügel mit robusteren Vorderflügeln. Um sie möglichst kompakt unter die Vorderflügel zu packen, falten sich diese Flügel entlang genau abgegrenzter, flexibler Gelenkzonen mit spezifisch definierten mechanischen Eigenschaften. Die gefalteten Flügel speichern in den Gelenkzonen elastische Energie, die ein schnelles Aufklappen und Entfalten ermöglicht, falls das Insekt einer Gefahr entkommen muss. Diese Faltmuster können mathematisch als Flexagone (ein bekanntes Origami-Faltmuster) beschrieben werden. Anhand mathematisch-geometrischer Beschreibungen wurde das kinematische Verhalten der unterschiedlichen Gelenkzonen dargestellt und konnte darauf aufbauend mit definierten Gradienten in den mechanischen Eigenschaften der Faserverbundkunststoffe materialisiert werden.
INTEGRATIVES DIGITALES DESIGN MODEL
Zur Erfassung verschiedener Aspekte, u.a. Gestaltung der Einzelkomponenten, kinematisches Verhalten, Diskretisierung der Faltelemente, Vernetzung, Simulation und statische Analyse sowie die Generierung von Fertigungsdaten, in einem kohärenten System, wurde ein integrativer, digitaler Arbeitsprozess wurde entwickelt.
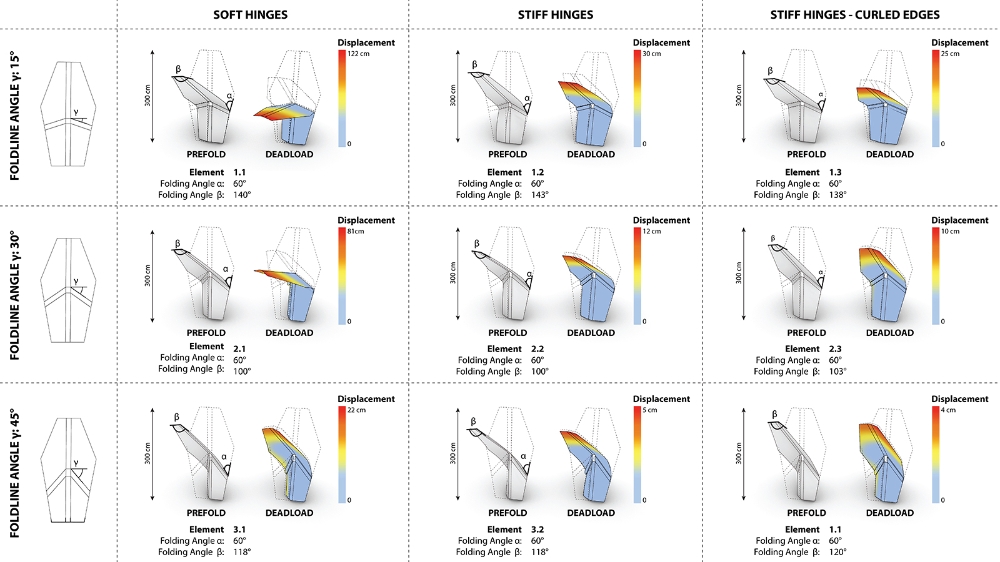
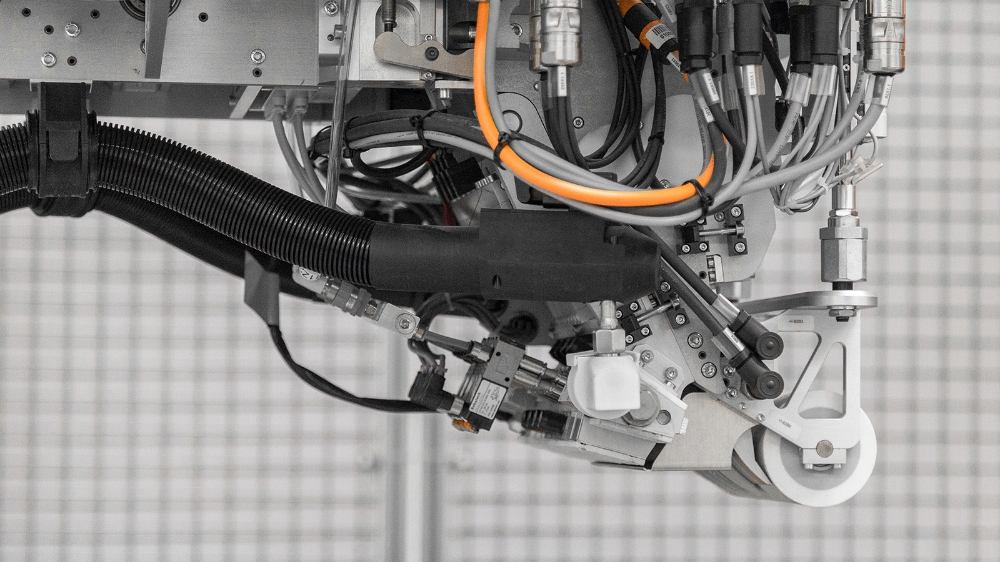
Das Faltmuster und die Bauteilkonturen wurden zunächst lediglich zweidimensional entworfen und die Geometrie anschließend anhand von Ebenen im Raum, die in Ausrichtung und Neigung justierbar sind, in dreidimensionale Elemente übertragen. Basierend auf dem anfänglich zweidimensionalen Faltmuster, wurde ein dreidimensionales, kinematisches Skelett entwickelt, mit dem das Faltverhalten evaluiert wurde. Verschiedene Einschränkungen und Auflagerbedingungen wurden implementiert und deren Einfluss auf die Kinematik und die daraus resultierende räumliche Anpassbarkeit analysiert. Im Hinblick auf die Fertigung wurden die Komponenten unter Berücksichtigung der fertigungsbedingten, strukturellen Rahmenbedingungen, sowie der Zuordnung spezifischer Materialeigenschaften für die verschiedenen Elemente diskretisiert. Im nächsten Schritt wurde das kinematische Verhalten mit einer Finite-Elemente-Analyse (FEA)-Software simuliert. Im letzten Schritt wurden Steifigkeitsgradienten und Diskretisierungsmuster implementiert, um den Laminataufbau des faserverstärkten Kunststoffs zu berechnen. Ein individualisiertes Computerprogramm ermöglichte die Ausgabe der Roboter-Steuerungs-Pfade und Maschinenkontrolldaten für den automatisierten Tape-Legeprozess.
HERSTELLUNG, MATERIALGRADIENTEN UND VERSTEIFUNGEN
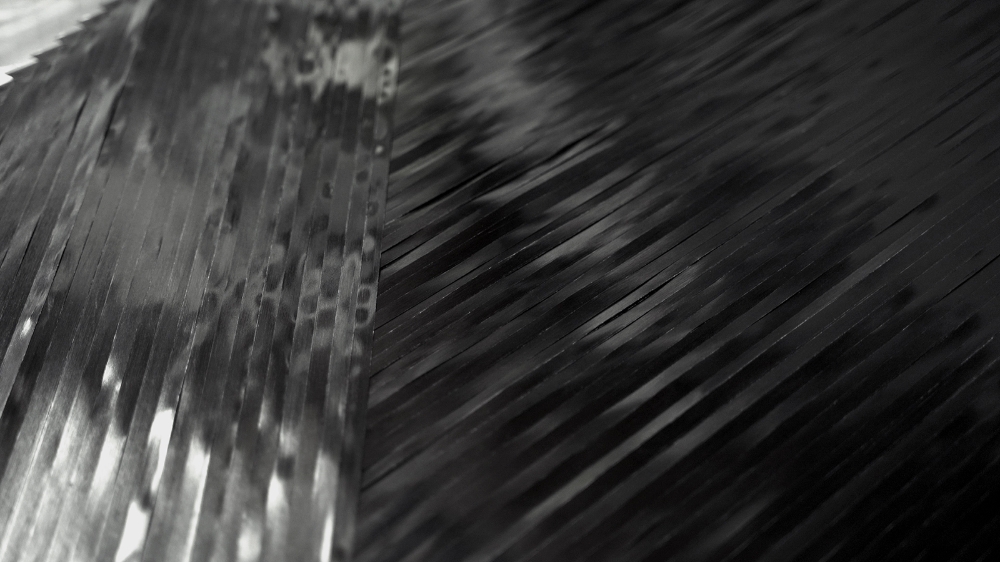
Der robotergestützte Legeprozess von Kohlenstoff- und Glasfasertapes mit Polyamid-Matrix ermöglicht die automatisierte Herstellung von Laminaten mit hochdifferenzierten Materialgradienten. So ist es auch möglich, die Materialeigenschaften durch die Anpassung der Faserorientierung und des Fasermaterials innerhalb der Komponenten im Hinblick auf die strukturellen und funktionellen Anforderungen exakt einzustellen. Kohlenstofffasern werden nur dort eingesetzt, wo sie statisch benötigt werden, während Glasfasern zur Herstellung vollflächiger Platten verwendet werden und durch ihre Transluzenz – bedingt durch die weißliche Farbe des in den Tapes verwendeten Polyamids – differenzierte Lichtverhältnisse ermöglichen.
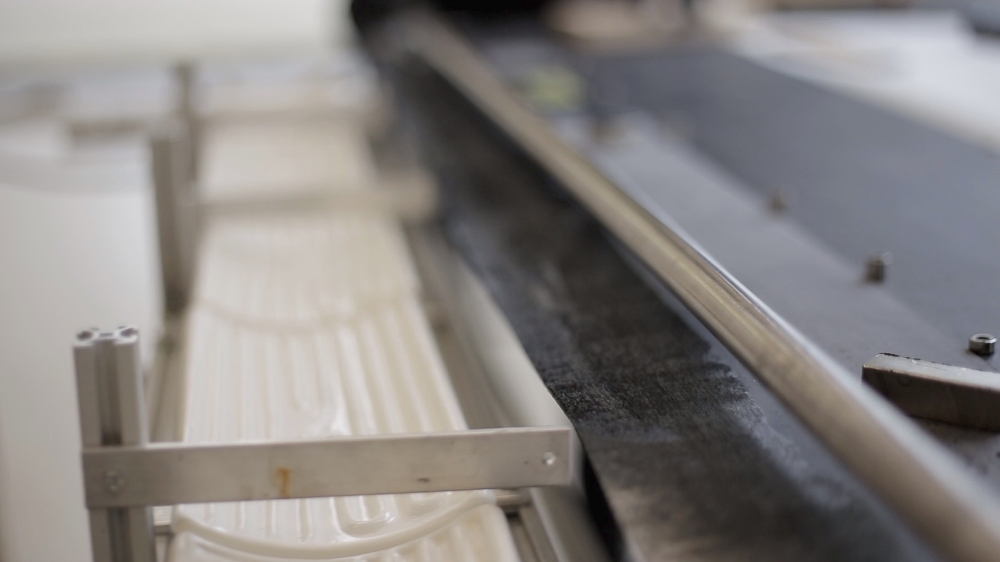
Nachdem die Tapes in der Ebene verlegt wurden, wird die thermoplastische Polyamid-Matrix in einer Heißpresse unter Kontakt mit den Heizplatten aufgeschmolzen. Anschließend wird der Lagenaufbau unter Druck in einer Kaltpresse gekühlt und so die faserverstärkten Verbundplatten konsolidiert. Um die Elemente gegen Durchbiegen zu verstärken, wurde in den Randbereichen die Möglichkeit der thermischen Nachbearbeitung von Polyamiden genutzt, um sie mit einer speziell entwickelten Maschine in hohlprofilartige Elemente zu biegen. So war es möglich, den Querschnitt und damit das Trägheitsmoment an definierten Stellen zu vergrößern, ohne dem Gesamtsystem gleichzeitig mehr Material und Gewicht hinzuzufügen.
INTEGRIERTE AKTUIERUNG
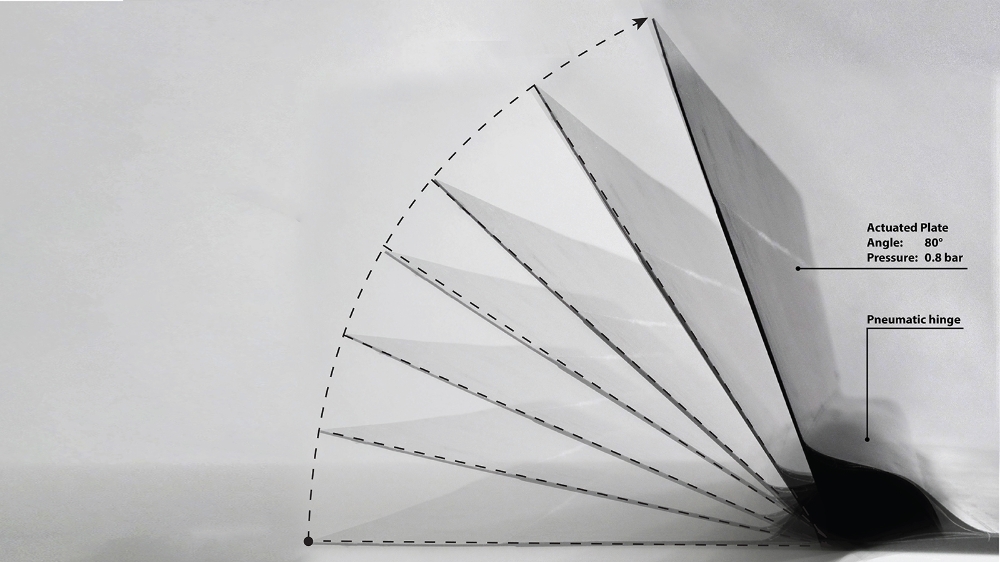
Die Bewegung des Demonstrators wird aktiv durch gleichzeitige Ansteuerung der pneumatischen Kissen in den verschiedenen Gelenkzonen ausgelöst. Dies ermöglicht eine höhere Differenzierung des kinematischen Verhaltens. Darüber hinaus erhöht der Luftdruck in den einzelnen Gelenken die Tragfähigkeit unter externer Belastung, z.B. Windlast. Durch die Integration des Aktuierungssystems in die flexiblen Gelenkzonen im Faserverbundkunststoff entfällt die Notwendigkeit mechanischer Verbindungen zwischen den Faltelementen und dem Aktuierungsmechanismus. Die außermittige Positionierung der Kissen innerhalb der Schichten des Laminataufbaus ermöglicht die Einstellung der Faltrichtung für die einzelnen Gelenke und dadurch eine kontrollierte Bewegung der Komponenten. Durch relativ breite und lange Gelenkzonen sind vergleichsweise niedrige Druckwerte (0,8 bar in den Horizontal- und 0,4 bar in den Vertikalgelenken) ausreichend, um substanzielle Winkeländerungen von bis zu 80 ° zu erreichen. Beim Falten wird in den nachgiebigen Gelenkzonen elastische Energie gespeichert, durch die die Elemente nach der Druckentlastung wieder selbstständig entfalten. Folglich ist eine aktive Ansteuerung durch die pneumatische Aktuierung nur in eine Bewegungsrichtung (Zufalten) erforderlich.
REKONFIGURATION, KONTROLLE UND INTERAKTION
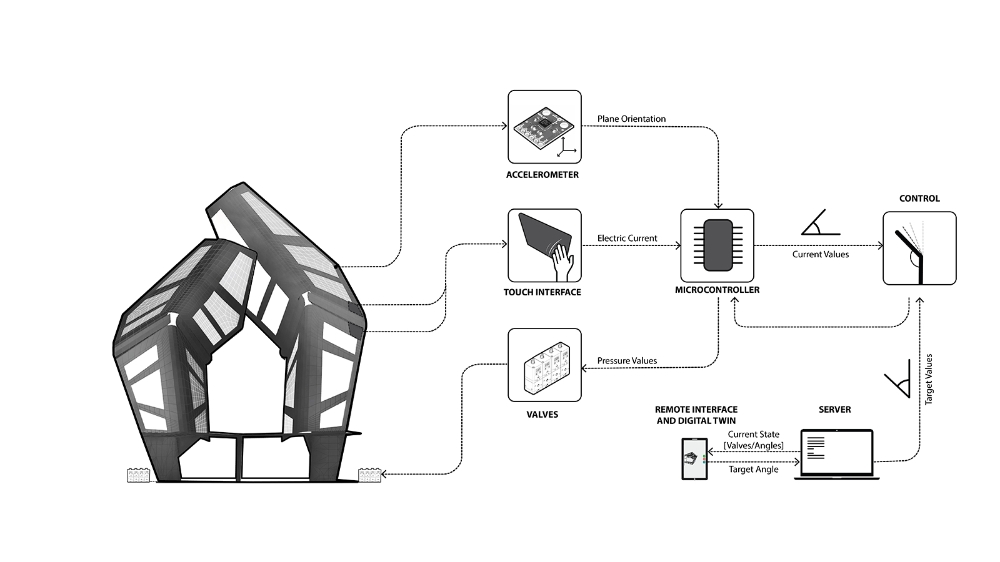
Um den Druck in jedem Aktuator individuell zu regeln, wird die Proportionaldruckregeltechnik eingesetzt. Die Steuerung erfolgt über einen zentralen Server, der mit analogen Signalgebern kommuniziert, um die Proportionaldruckregelventile zu steuern und die Faltbewegung der Elemente auszulösen. Beschleunigungssensoren, die in die Verbundplatten integriert sind, dienen dazu, den aktuellen Faltzustand des Demonstrators zu bestimmen. Der physische Zustand des Demonstrators wird durch diese Sensordaten und -informationen in einem digitalen Zwilling abgebildet und visualisiert. Um individuell programmierbare Sensormodule zu erstellen, wurden Platinen entwickelt, die über einen seriellen I2C-Bus verbunden sind. Dadurch kann die Sensorintegration verbessert und die Komplexität der Kommunikation und Hardware minimiert werden.
Für die Interaktion mit dem adaptiven Demonstrator wurden zwei Szenarien entwickelt:
Das erste Interaktionsszenario nutzt die elektrische Leitfähigkeit der Kohlenstofffasern für eine physische Interaktion zwischen Nutzer und architektonischem Element. Die Berührung verschiedener sensorischer Bereiche löst unterschiedliche Bewegungen aus.
Die zweite Interaktionsmethode verwendet eine mobile und webbasierte Benutzeroberfläche, die es dem Benutzer ermöglicht, die Bewegung des Demonstrators über Smartphone oder Tablet-PC zu steuern. Das Interface visualisiert gleichzeitig einen digitalen Zwilling in einem 3D-Modell des aktuellen Faltzustands.
INTEGRIERTER DEMONSTRATOR
Der ITECH Forschungsdemonstrator 2018-19 besteht aus zwei Faltkomponenten mit einer Breite von 1,70 m und einer Höhe von 3,00 m bzw. 2,50 m und einem Gewicht von 23 kg pro Element. Die Laminate für die beiden Elemente wurden durch robotergestütztes Tape-Legen hergestellt. Es wurden bis zu acht Kohlenstoff- und Glasfasertapes mit Polyamid-Matrix gleichzeitig in einer Gesamtlänge von ca. 30 km und einer Einzeltape-Breite von 12 mm verarbeitet. Die Komponenten wurden in mehrere von den Fertigungsbedingungen abhängige Einzelelemente diskretisiert und unter Berücksichtigung von spezifischen mechanischen Anforderungen hergestellt. Mit einem maximalen Aktuierungsdruck von 0,8 bar in den horizontalen und 0,4 bar in den vertikalen Gelenkzonen kann ein Faltwinkel von bis zu 80° erreicht werden.
Der Demonstrator belegt die prinzipielle Anwendbarkeit eines automatisierten Herstellungsprozesses auf einer adaptive Faltstruktur im architektonischen Maßstab, deren Bewegung über diskrete, nachgiebige Gelenkzonen mit integrierten pneumatischen Aktuatoren gesteuert wird. Darüber hinaus werden im Demonstrator die Möglichkeiten der Interaktion zwischen gebauter Umwelt und ihren Bewohnern zur Veränderung der räumlichen Konfiguration durch aktive Steuerung und Echtzeitkommunikation zwischen Nutzer und Architektur untersucht. Er setzt intensiv auf einen integrierten, computerbasierten Entwurfs-, Simulations- und Fertigungsprozess und zeigt das Innovationspotenzial einer interdisziplinären Forschungs- und Lehrumgebung auf.
PROJEKTTEAM
ICD Institut für Computerbasiertes Entwerfen und Baufertigung– Prof. Achim Menges
ITKE Institut für Tragkonstruktionen und Konstruktives Entwerfen – Prof. Dr.-Ing. Jan Knippers
ITFT Institut für Textil- und Fasertechnologien – Prof. Dr.-Ing. Götz T. Gresser
Wissenschaftliche Entwicklung und Projektleitung
Axel Körner, Larissa Born, Oliver Bucklin, Seiichi Suzuki, Lauren Vasey
Konzeptentwicklung, Systementwicklung und Realisierung
Miro Bannwart, Eliza Biała, Xiaoyu Chen, Rebeca Duque Estrada de Almeida Araujo, Farnaz Fattahi, Rob Faulkner, David Horvath, Niloofar Imani, You-Wen Ji, Fabian Kannenberg, Nate Kaylor, Denitsa Koleva, Jure Kozmos, I-Ching Lee, Ada Leżuchowska, Zhiqi Lin, Samantha Melnyk, Seyed Mobin Moussavi, Mona Mühlich, Seyed Ahmad Razavi, Tamara Rosales, Emi Shiraishi, Sanoop Siby, Piyanat Songkhroh, Hana Svatoš-Ražnjević, Naomi Kris Tashiro, Babasola Thomas, Aditya Tiwari, Maria Wyller, Nima Zahiri, Ruqing Zhong
Mit Unterstützung von
Anja Mader, Katja Rinderspacher, Maria Yablonina
In Zusammenarbeit mit
Compositence GmbH
Institut für Evolution und Ökologie, Fachbereich Evolutionsbiologie der Invertebraten – Prof. Oliver Betz
Zentrum für Angewandte Geowissenschaften, Fachbereich Invertebraten-Paläontologie – Prof. James Nebelsick
Universität Tübingen
Unterstützt von
Autodesk
Roy Hohlfeld