LEVERAGING THE BUILDING MATERIAL AS PART OF THE ROBOTIC KINEMATIC SYSTEM FOR PARALLEL CONSTRUCTION
This project is part of the Cluster of Excellence EXC 2120 "IntCDC", funded by the German Research Foundation (DFG).
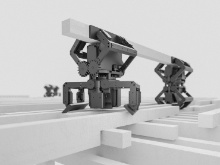
Contemporary applications of robotics in the construction industry are primarily focusing on automation of conventional and at best slightly altered construction processes. Contrary to this automation approach, this project explores methods for co-design and development of a complimentary robotic and architectural systems, where the manipulator and the building material are co-designed.
For more detailed information, please refer to the Cluster’s project page: https://www.intcdc.uni-stuttgart.de/research/research-projects/rp-19/