
Project Gallery



{kind=link}
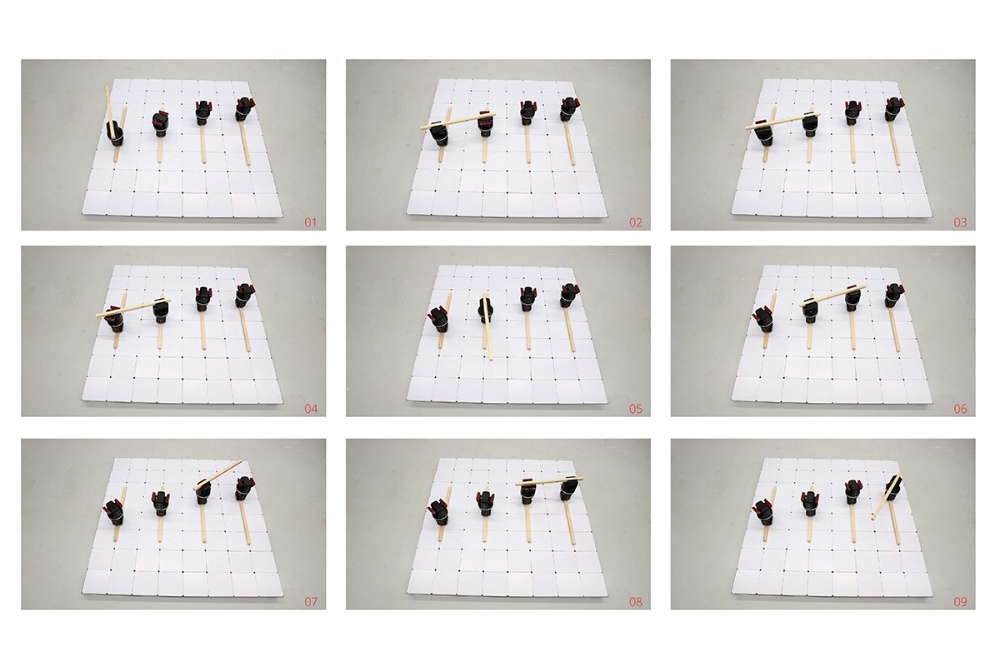
Distributed Robotic Assembly System for In-Situ Timber Construction
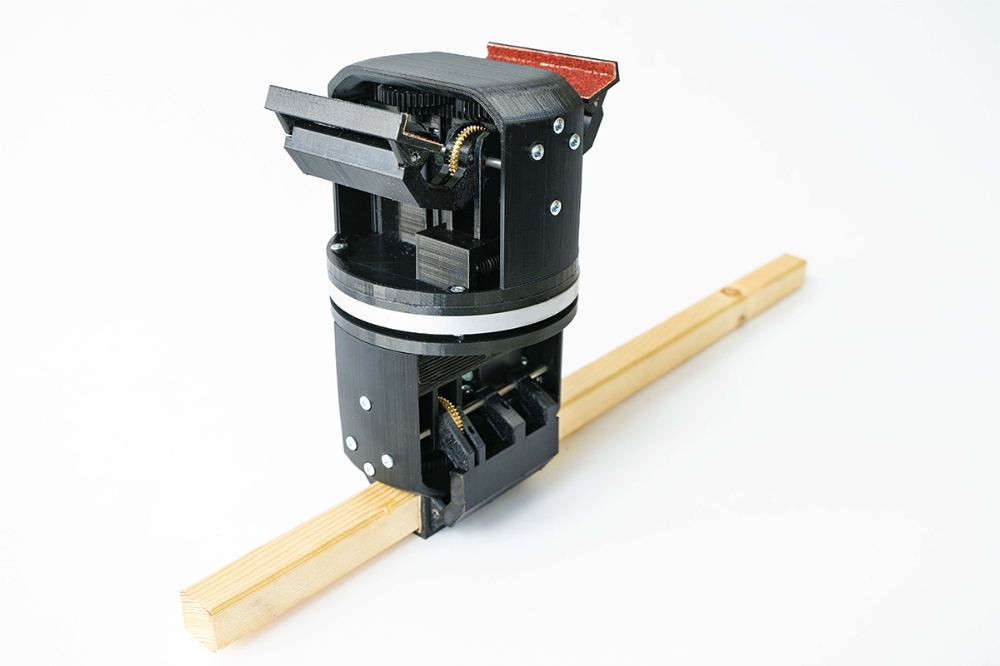
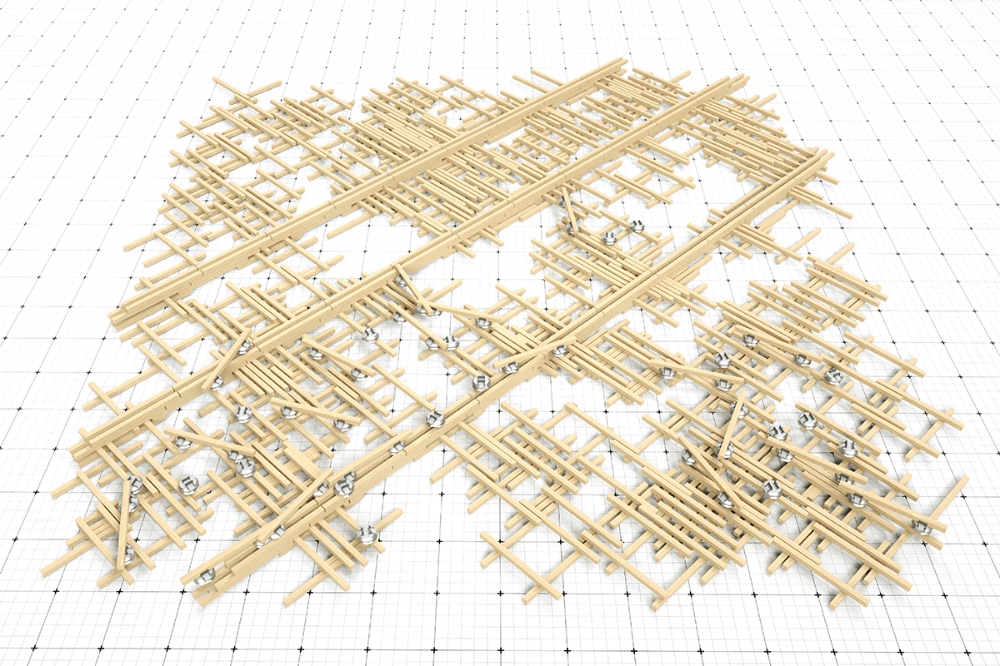
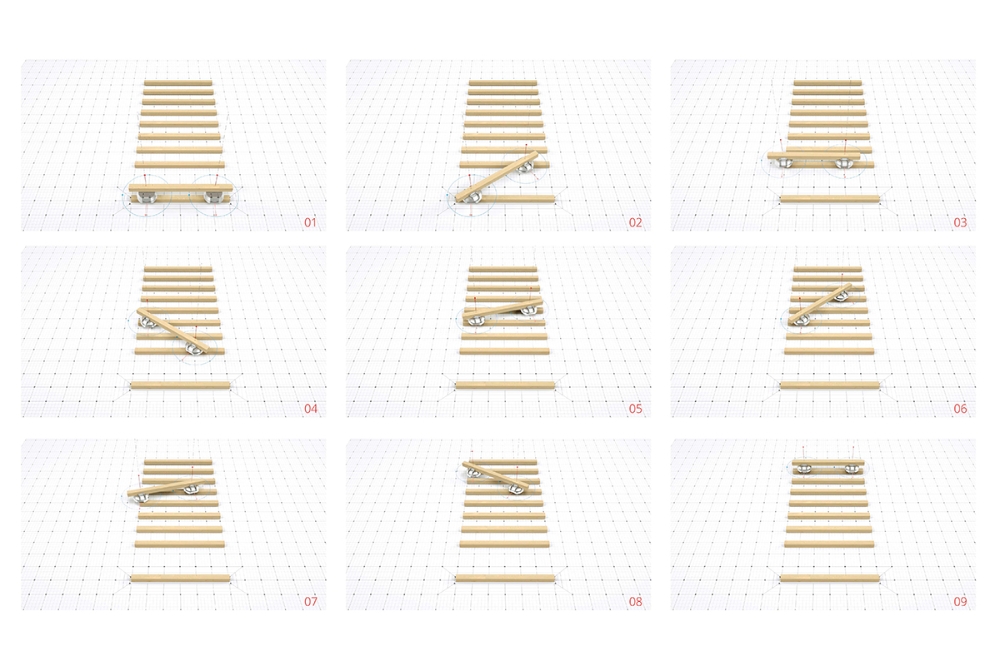
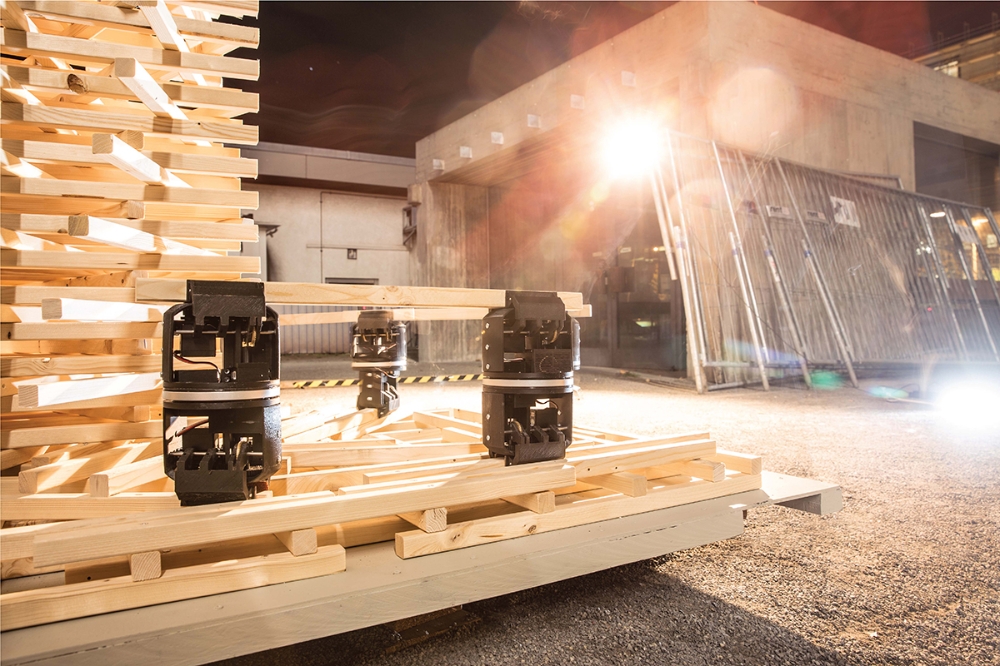
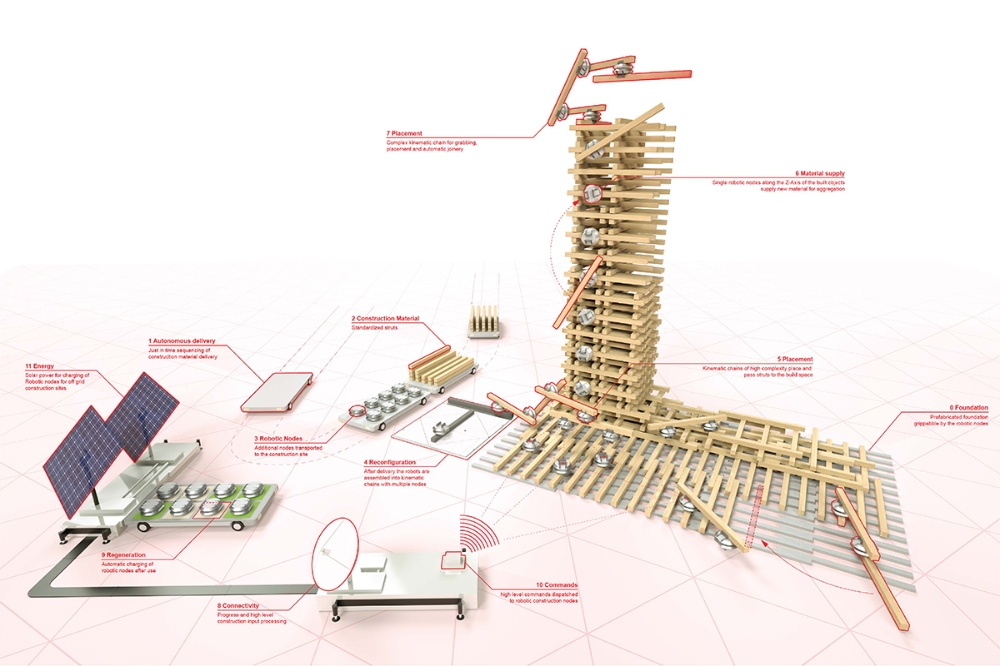
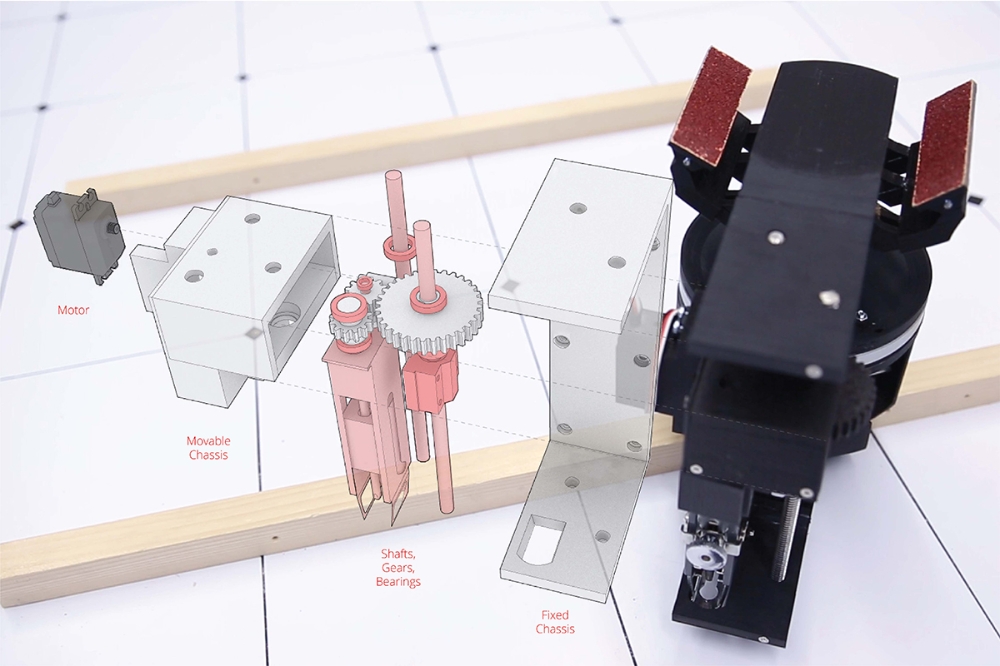
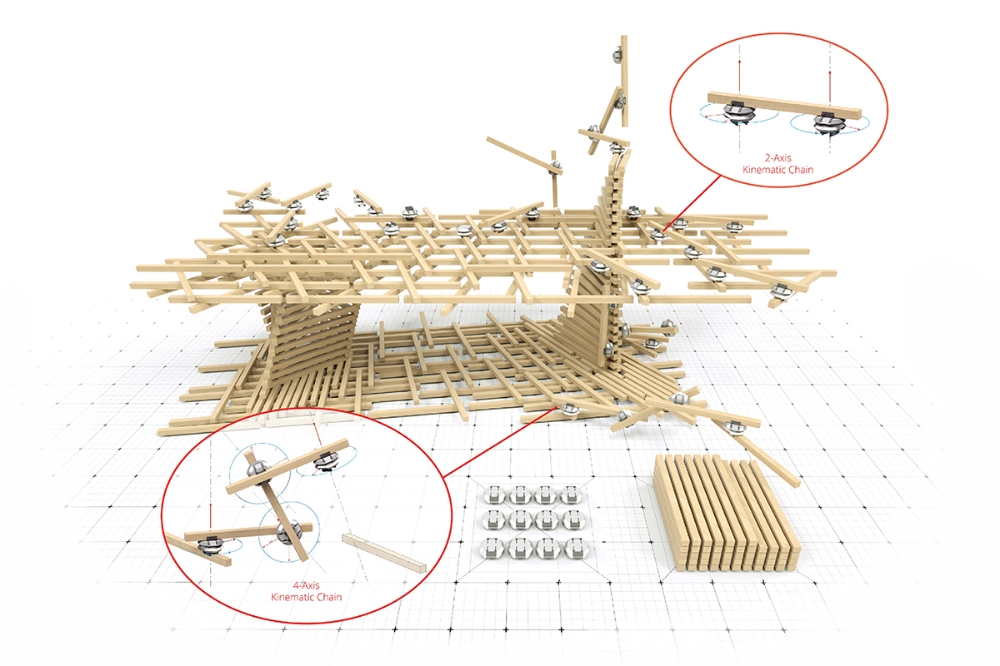
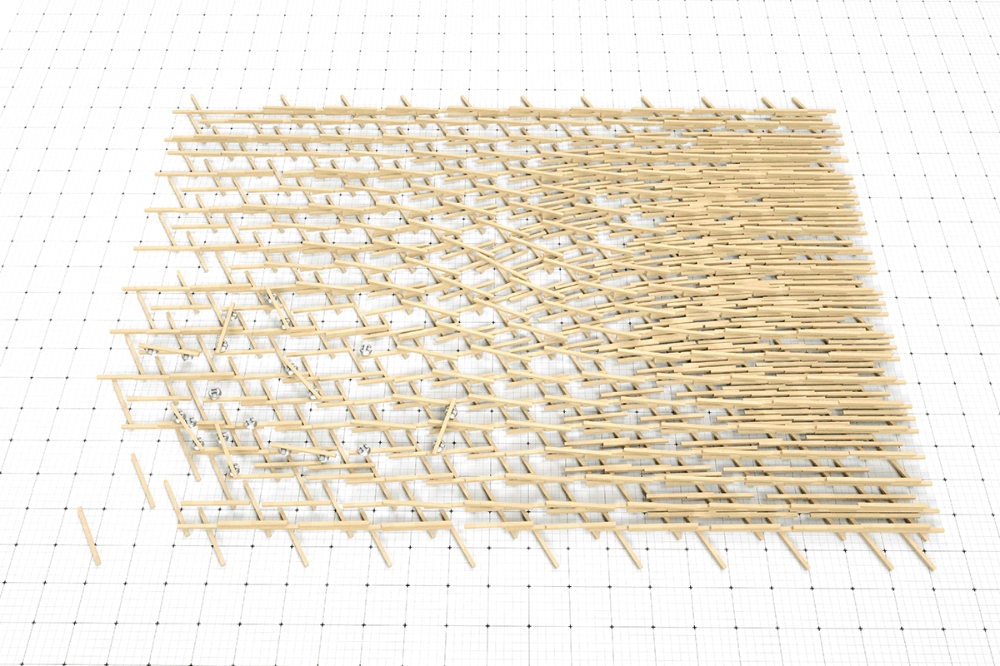
The project Distributed Robotic Assembly System for In Situ Timber Construction explores the potential impact of creating a new architecture-specific robotic system for the creation of complex timber assemblies. The developed system is composed of multiple collaborative single axis robots, designed to utilize standardized timber beams as a building material and for its locomotion system. The material is therefore not only used in the final built structure but forms an integral part of the robotic system, minimizing its complexity. The minimalism, low cost, lightness in weight and robustness of the entire system contrasts current standards of pre-fabrication and pre-planned structures for timber-based architecture. When the proposed system is deployed on-site, one can imagine multiple robotic teams working quickly and in parallel to create structures with long spans or large heights that are reversible and through that adaptive to change. As such, a construction future is conceptualized where distributed robotics can build around the clock, higher, faster, stronger and quieter.
ITECH M.Sc. Thesis Project 2018: Distributed Robotic Assembly System for In-Situ Timber Construction
Samuel Leder, Ramon Weber
Thesis Advisers: Dylan Wood, Oliver Bucklin
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
The project Distributed Robotic Assembly System for In Situ Timber Construction explores the potential impact of creating a new architecture-specific robotic system for the creation of complex timber assemblies. The developed system is composed of multiple collaborative single axis robots, designed to utilize standardized timber beams as a building material and for its locomotion system. The material is therefore not only used in the final built structure but forms an integral part of the robotic system, minimizing its complexity. The minimalism, low cost, lightness in weight and robustness of the entire system contrasts current standards of pre-fabrication and pre-planned structures for timber-based architecture. When the proposed system is deployed on-site, one can imagine multiple robotic teams working quickly and in parallel to create structures with long spans or large heights that are reversible and through that adaptive to change. As such, a construction future is conceptualized where distributed robotics can build around the clock, higher, faster, stronger and quieter.
ITECH M.Sc. Thesis Project 2018: Distributed Robotic Assembly System for In-Situ Timber Construction
Samuel Leder, Ramon Weber
Thesis Advisers: Dylan Wood, Oliver Bucklin
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers
Samuel Leder, Ramon Weber
Thesis Advisers: Dylan Wood, Oliver Bucklin
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers