Photographs and Development Process images by ICD University Stuttgart



{kind=link}
Mobile Robotic Fabrication Eco-System
The MoRFES_01 project demonstrates a fabrication process for tensile filament structures using multiple mobile robots. This presented project aims to expand the scope of robotic fabrication for architecture through the introduction of custom, cooperative variety of task-specific robots. It proposes a collaborative system of three robots of two species, introducing the discourse of robot ecologies, moving beyond “using biology as merely a source of convenient metaphors or a superficial formal repertoire; towards observing fabrication strategies as; relationships between organisms and their environment”, where organisms are machines and environment is the construction site (Hensel, Menges, 2006).
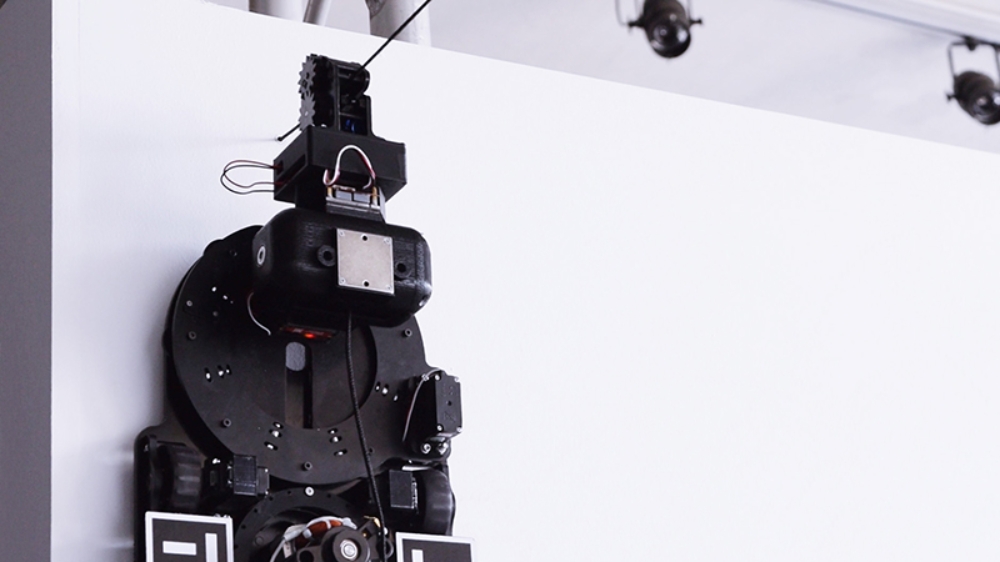
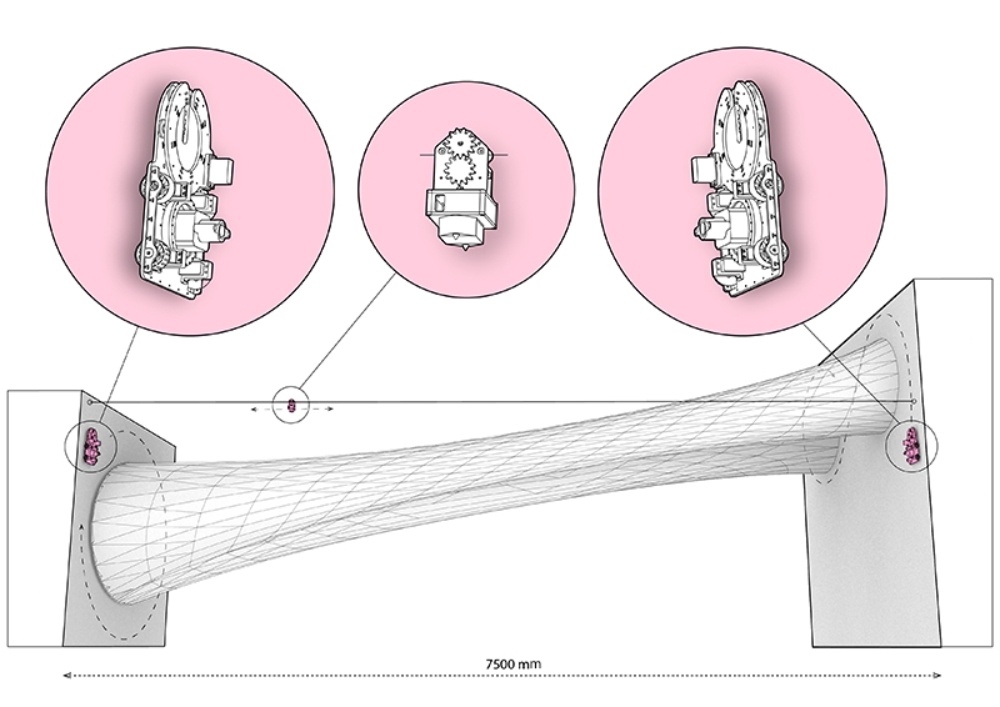
Two Wall Climber robots and a Thread Walker robot collaboratively construct a 7.5-meter-long structure spanning between two anchor surfaces in an exhibition space. The Thread Walker picks up the filament cartridge from one of the Wall Climbers, then crosses the distance between the anchor walls, passes the cartridge to the second Wall Climber, which in turn attaches it to one of the anchors (Figure 8). This way the distance between the walls can be increased significantly and the fabrication between two parallel anchor surfaces is possible.
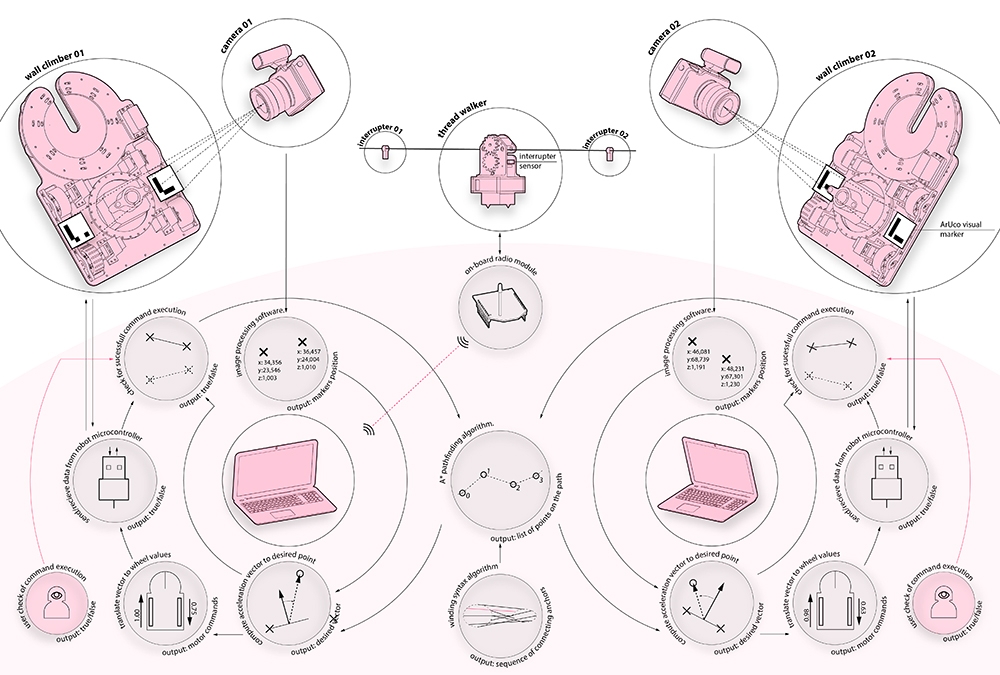
All robots are controlled autonomously using an external perception system consisting of cameras observing the fabrication surface and visual markers installed on the robot bodies. During the exhibition opening hours the system operation was demonstrated live in a performance format, showing the construction process.
More information about the exhibition: link
ICD Institute for Computational Design and Construction – Prof. Achim Menges
Research Assistants
Olga Kalina
LOGOTEL Exhibition Team
Cristina Favini
Gianluca Alderuccio
Valeria Crociata
Matteo Amori
Matteo Camurani
Antonella Castelli
Giorgio De Marco
Giuseppe Giordano
Barbara Nocerino
Monia Rende
Luca Casati
Gianluca Giurdanella
Valeria Nucera
Danilo D’Ercole
Massimo Leonardi
Davide Leto Barone
Exhibition Curators
Susanna Legrenzi
Stefano Maffei
With the support of
Logotel
GETTYLAB