Designing for Unsupervised Construction: An Investigation of the Affordances of On-Site Assembly
Since the First Industrial Revolution, the construction and maintenance of buildings and infrastructure has been characterized by a reliance upon heavy equipment, which has shaped how designers and engineers conceive of their agency in the built environment. However, 21st century advances in hardware and control systems allow for distributed and autonomous hardware solutions, enabling a paradigm shift in the co-design of machines and the interventions they deliver. However, in order to overcome the inertia of the mature technologies developed around heavy equipment, an entirely new suite of sensors, actuators and algorithms needs to be developed.
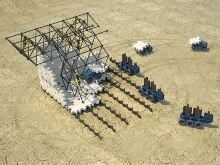
This thesis presents an argument for small-scale distributed robotics for construction automation, and demonstrates that this approach can utilize practical materials to build useful structures in unpredictable environments. This argument is supported by an extensive literature review focused on the techno-logical requirements for unsupervised (fully autonomous) robotic construction, and identifies gaps between academic and industry research that remain unfilled. Among these overlooked areas are (1) the need for embedded sensing in construction materials, and for co-designing robot hardware in coordination with novel construction robots, and (2) the need for an autonomous solution to providing foundation support. These two needs are explored through the representative example tasks of truss assembly and piledriving, respectively. Each task is demonstrated in prototypical hardware, with an emphasis on realistic materials and scenarios not dependent on human preparation. Each task is explored in simulation as multi-agent deployments. Finally, a summarizing demonstration illustrates how these two research findings might be leveraged in coordination to advance autonomy in an example construction scenario.
ICD Institute for Computational Design - Prof. Achim Menges
Scientific Development
Nathan Melenbrink
Cooperation Partners
Designing Emergence Laboratory, Harvard University -- Dr. Justin Werfel
Simpson Gumpertz & Heger -- Paul Kassabian
Contact Information

Nathan Melenbrink
B.Arch., M.DesS, Dr.-Ing.Doctoral Candidate