Integrated Computational Design Methods Based on Machine Learning Tools for a Newly Developed Biomimetic Continuous Shell Extrusion Technology
With its strong focus on robotic fabrication and integrative design strategies, current architectural design research clears the way for a fundamental transformation in architecture from a hand craft industry into a highly automated technology-driven manufacturing industry. Consequently, the increased variety of materialisation logics including among others robotic composite printing, UAV aided fabrication or discrete robotic assembly will diversify the toolbox of future architects. But a higher sophistication in available fabrication machinery in turn demands a higher sophistication in computational design strategies to fully leverage the fabrication potentials of those tools. Here a disconnect between newly developed hardware tools and relatively well known CAD/CAM software solutions results in an excessive amount of work in remodeling, whenever fabrication constraints need to be mediated with the architect’s design intent. Ideally the fabrication logic should be developed alongside with a well suited design framework. The proposed doctoral thesis therefore aims at conceiving a highly innovative bio-inspired fabrication technology that can potentially provide a variegated formal freedom. It furthermore aims at developing a well suited integrative design framework, leveraging capabilities of state-of-the-art machine learning (ML) research, that is tailored towards the specific fabrication logic but can be generalized for other fabrication strategies.
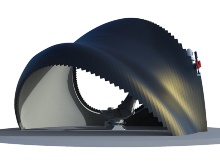
Inspired by the shell formation in molluscs an innovative rapid additive manufacturing (RAM) technology for the continuous extrusion of composite shells in the architectural scale was envisioned. This RAM technique is based on the continuous 6 DOF robotic extrusion of thermoplastic strips which are laterally attached to one another and subsequently reinforced. The theoretic increase in formal freedom resulting from its novel approach is limited by a number of fabrication constraints such as limitations in robotic reach, effector geometry and material deformation during extrusion. In order to fully leverage the potentials in formal freedom, an integrative computational design method will be developed which generates connected strip segment layouts that depict the architect’s design intend and considers the aforementioned fabrication constraints. It will therefore not only generate the virtual geometry of a printable shell, but also the instructions for the extrusion machinery, effectively forming an integrated design-control engine.
In the absence of suitable software solutions to perform this task, state-of-the-art machine learning algorithms will be incorporated. To get a diverse perspective and not rely on a single strategy, the proposed thesis will critically examine two contrary 3D modeling paradigms and enhance them with suitable machine learning algorithms: Track a): Constraint-incorporating static object modeling through Self-Organizing Structures The Self-Organizing Map (SOM) is a type of artificial neural network capable of producing a low-dimensional, discretised representation of a (continuous) higher-dimensional space by performing unsupervised learning. By extending and customizing the typical two-dimensional network topology to high-dimensional grids or irregular mesh topologies, a more generic form of a Self-Organizing Structure (SOS) can be introduced. By further extending the self-organisation procedure by the paradigm of shape matching constraints, fabrication-relevant constraints such as the width of shell segments can be incorporated in the form generation process. Track b): Constraint-driven process planning through agent-based reinforcement learning Reinforcement learning (RL) is a sub field of machine learning in which a computational entity is encouraged to repeat and improve favorable actions and avoid detrimental ones by applying positive and negative reward respectively whenever
they appear. As such it is tightly intertwined with agent-based computation and its structure of agent-environment-coupling. A generative agent will be made to learn to extrude well performing shell geometries, while maintaining robotic reachability and valid nozzle cross section and minimizing shell deformation, through periodic evaluation and retraining.
PROJECT TEAM
Institute for Computational Design and Construction (ICD), University of Stuttgart
Prof. Achim Menges (Principal Investigator)
Benjamin Felbrich
Department of Earth Sciences, Eberhard Karls University Tübingen
Prof. Dr. James Nebelsick (Principal Investigator)
Dr. Christoph Allgaier
Institute for Control Engineering of Machine Tools and Manufacturing Units
Prof. Dr. Alexander Verl (Principal Investigator)
Frederik Wulle
Project Funding
German Research Foundation (DFG)
Publications
Felbrich, B., Wulle, F., Allgaier, C., Menges, A., Wurst, K.H., Verl, A., Nebelsick, J. (2018). A novel Rapid Additive Manufacturing concept for architectural composite shell construction inspired by the shell formation in land snails. In Bioinspiration & Biomimetics https://doi.org/10.1088/1748-3190/aaa50d
Felbrich, B; Frueh, N.; Prado, M.; Saffarian, S.; Solly, J.; Vasey, L.; Knippers., J.; Menges, A.: 2017, Multi-Machine Fabrication: An Integrative Design Process Utilising an Autonomous UAV and Industrial Robots for the Fabrication of Long Span Composite Structures, in ACADIA – Disciplines & Disruption [Proceedings of the ACADIA Conference 2017], Massachusetts Institute of Technology, Cambridge, MA, pp. 248-259. (ISBN: 978-0-692-96506-1)
Nebelsick, J; Allgaier, C.; Felbrich, B; Coupek., D.; Reiter, R.; Reiter, G.; Menges, A.; Lechler, A.; Wurst, K.: 2016, Continuous Fused Deposition Modelling of Architectural Envelopes Based on the Shell Formation of Molluscs: A Research Review, In Knippers, J.; Nickel, K.; Speck, T. (Eds.): Biomimetic Research for Architecture and Building Construction, DOI: 10.1007/978-3-319-46374-2_12
Allgaier, C.; Felbrich, B.; Wulle, F.; Khechine, E.; Nebelsick, J; Menges, A.; Reiter, G.; Reiter, R.; Verl, A.; Wurst, K.: 2017 Schnecken als lebende 3D-Drucker: freie Formen für die Architektur von morgen, In Stuttgarter Beiträge zur Naturkunde, Serie C, Band 82, 2017, J. Knippers, U. Schmid, T. Speck [Hrsg.]: “Baubionik – Biologie beflügelt Architektur”
External Links
Collaborative Research Centre TRR 141 "Biological Design and Integrative Structure"
Contact Information

Benjamin Felbrich
Dipl.-Ing.Doctoral Candidate