
Photos of the printed dissertation



A Systematic Approach for Developing Agent-based Architectural Design Models of Segmented Shells
Towards Autonomously Learned Goal-oriented Agent Behaviors
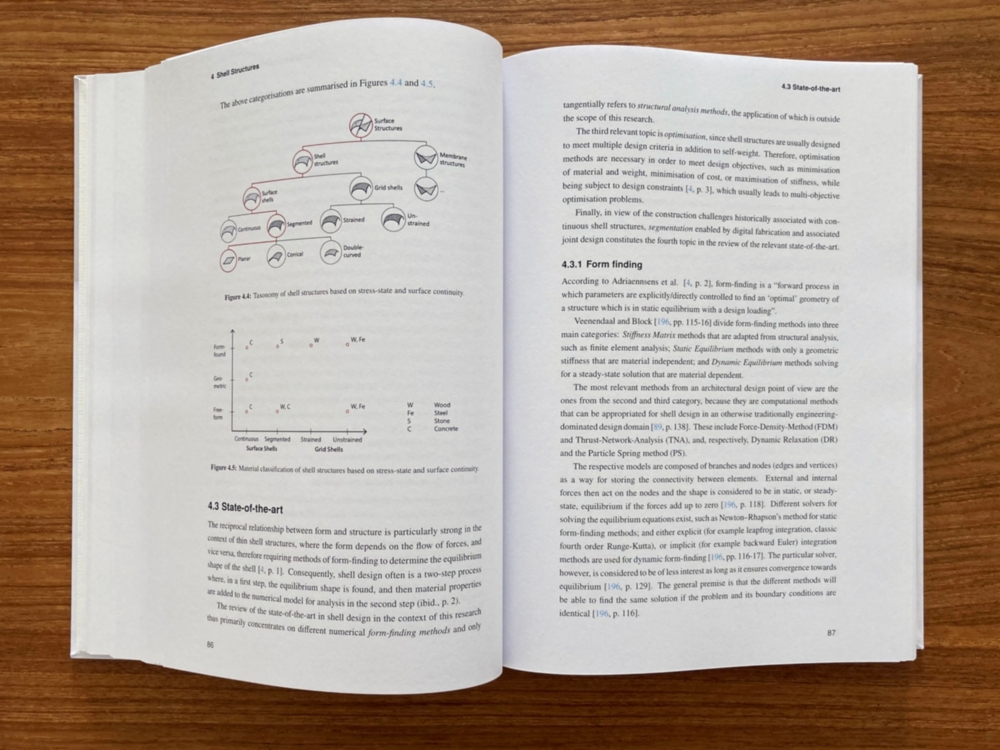
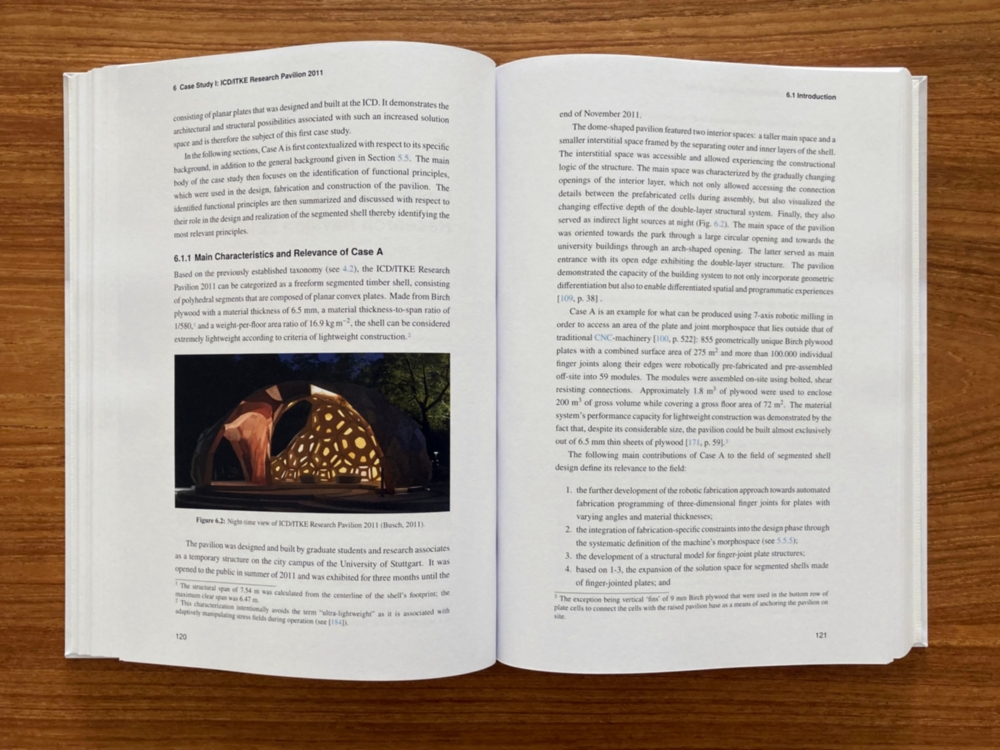
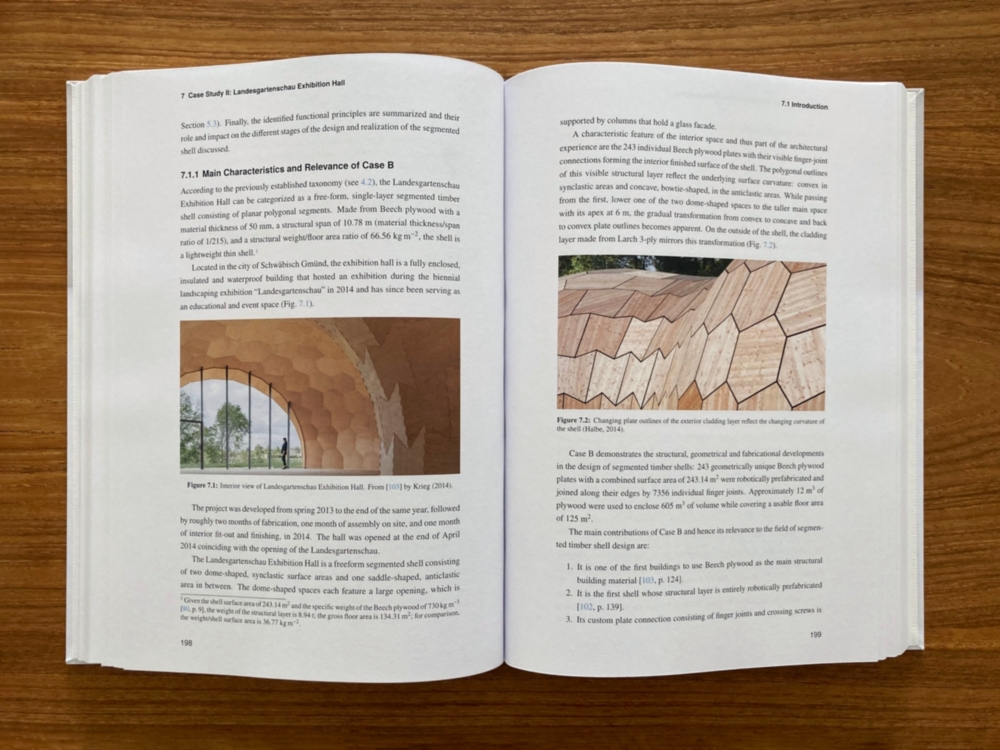
Segmented shell design constitutes a novel and promising research area in shell design that has emerged over the last 10 years. The prospect of dividing a continuous shell surface into segments is to resolve some of the constraints of continuous shells that have limited their application in building practice. As part of large-span surface structures, segmented shells have shown to possess similar desirable features, while allowing for a high degree of prefabrication. The geometry of individual building elements and global form are, however, complex, which poses a challenge to designing and building segmented shells.
One of the challenges of segmented shell design in particular is meeting multiple interrelated, sometimes conflicting, evaluation criteria: geometric validity, structural stability, and producibility. In segmented shell design geometric validity and producibility are aspects that can be considered locally, meaning on the level of the individual building element, while structural stability needs to be evaluated globally and can be conceived of as the global effect of the properties and interactions of all segments in the shell.
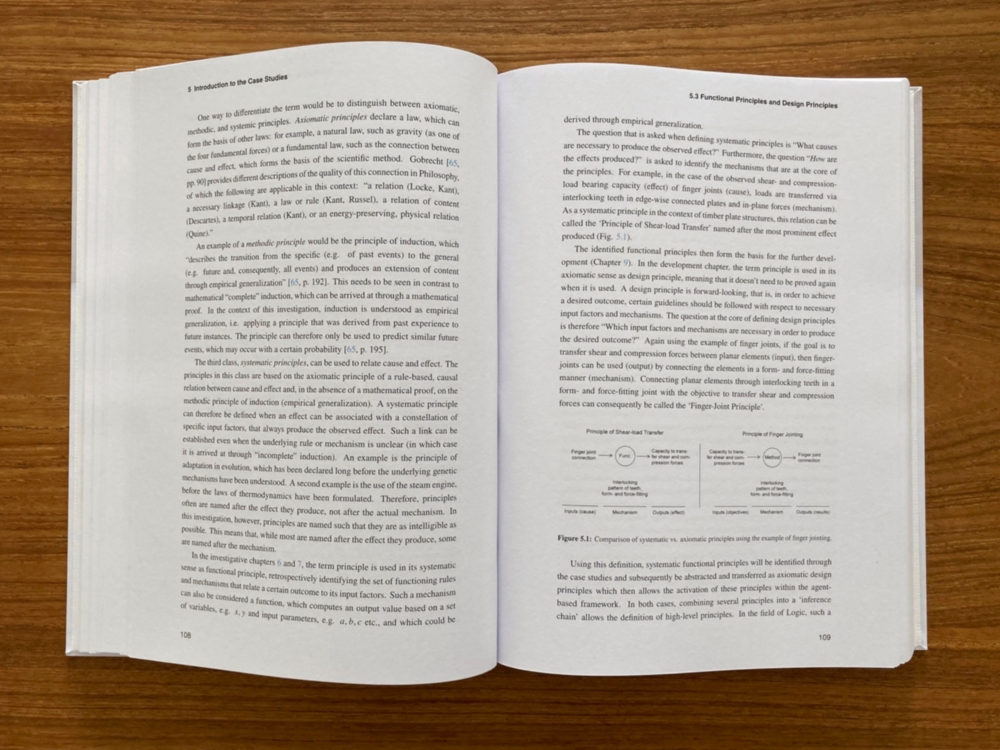
Agent-based modeling and simulation (ABMS) provides the opportunity to bridge the gap between local characteristics and global performance. By focusing on the detailed description of the individual building elements and their interactions and by conceiving of the global form as the result of a myriad of local interactions of virtual agents representing building elements, the global design problem can be solved in parallel on the level of the individual building elements.
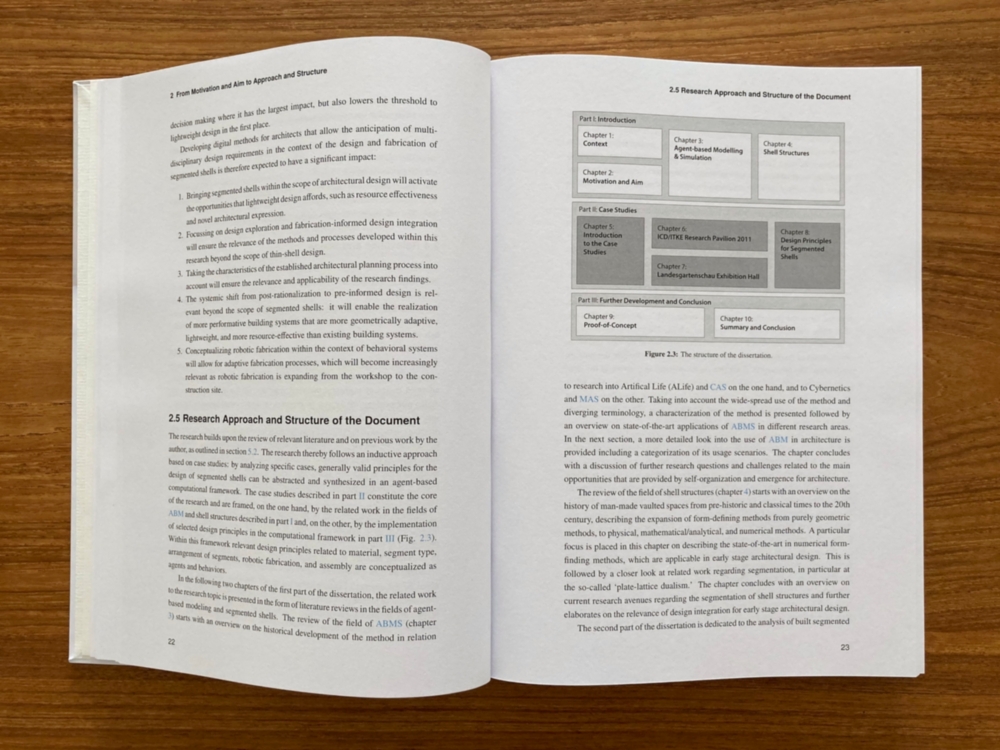
The work thus proposes a methodology for developing agent-based models of buildings where agents constitute building elements. The research pursues and synthesizes two investigative strands: on the one hand, generalizing findings from previously built plate shells as part of a case study-based, inductive research approach, which is geared towards building a catalog of validated design principles for plate shells; on the other hand, systematizing the agent-based modeling approach for architectural design-oriented applications in general, and plate shell design in particular.
The publication is open-access and can be downloaded free of charge from the University's publication server: http://dx.doi.org/10.18419/opus-11633
CREDITS
Scientific Development
Supervisor and first examiner
Prof. Achim Menges, Institute for Computational Design and Construction (ICD)
Second examiner
Prof. Jan Knippers, Institute for Building Structures and Structural Design (ITKE)
Funding
German Research Foundation
EFRE / BW
RELATED RESEARCH BUILDINGS / PROTOTYPES
RELATED PUBLICATIONS
Schwinn, T. (2021). A systematic approach for developing agent-based architectural design models of segmented shells : towards autonomously learned goal-oriented agent behaviors. ICD Research Report No. 4, Universität Stuttgart, Stuttgart. http://dx.doi.org/10.18419/opus-11633.
Schwinn, T., Sonntag, D., Grun, T., Nebelsick, J. H., Knippers, J., & Menges, A. (2019). Potential applications of segmented shells in architecture. In J. Knippers, U. Schmid, & T. Speck (Eds.), Biomimetics for Architecture (pp. 116–125). Berlin, Basel: Birkhäuser. https://doi.org/10.1515/9783035617917-015
Groenewolt, A., Schwinn, T., Nguyen, L., & Menges, A. (2018). An interactive agent-based framework for materialization-informed architectural design. Swarm Intelligence, 12(2), 155–186. https://doi.org/10.1007/s11721-017-0151-8
Schwinn, T., & Menges, A. (2015). Fabrication Agency: Landesgartenschau Exhibition Hall. In Architectural Design, 85(5), 92–99. doi:10.1002/ad.1960
Schwinn, T., Krieg, O.D., Menges, A. (2014). Behavioral Strategies: Synthesizing design computation and robotic fabrication of lightweight timber plate structures. In Design Agency [Proceedings of the 34th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA)], Los Angeles, pp. 177–188. (ISBN 9781926724478)
Schwinn, T., Krieg, O., Menges, A. (2012). Robotically Fabricated Wood Plate Morphologies – Robotic Prefabrication of a Biomimetic, Geometrically Differentiated Lightweight Finger Joint Timber Plate Structure, in Brell Cokcan, S., Braumann, J. (eds.), Proceedings of the Robots in Architecture Conference 2012, TU Vienna, Springer, Vienna, pp. 28-47. (ISBN 978-3709114643)
Schwinn, T., Krieg, O., Menges, A., Mihaylov, B., Reichert, S. (2012). Machinic Morphospaces: Biomimetic Design Strategies for the Computational Exploration of Robot Constraint Spaces for Wood Fabrication, in Cabrinha, M., Johnson, J., Steinfeld, K. (eds.), Proceedings of the 32nd Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA), San Francisco, pp. 157-168. (ISBN 978-1-62407-267-3)
Contact Information

Tobias Schwinn
Dr.-Ing.Head of Research and Research Infrastructure